


Surveillance And Reconnaissance Quadruped.

About the project
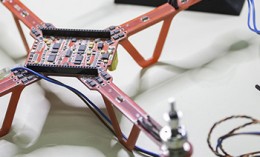
Quadruped means having four legs. So, I have designed and built a quarduped robot with four legs and a tail. It consists of 8 joints , 8 links and 1 main frame. A microcontroller and power source is fitted over it. It has proximity sensor for obstacle avoidance. A PIR sensor to sense human presence as a part of surveillance.
Project info
Difficulty: Moderate
Platforms: Adafruit, Arduino, Raspberry Pi, XBee
Estimated time: 4 days
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

|
Arduino Uno Rev 3 | x 1 | |
|
Ultrasonic Sensor Hc-sr04 | x 1 | |

|
SG-90 Servo motor | x 5 | |
|
|
Jumper wires | x 1 | |
|
|
Breadboard | x 1 | |
|
|
Camera module | x 1 | |

|
Weight Sensor (Load Cell) 0-3kg | x 1 | |
|
|
MG 90 servo motor | x 4 |
View all
Story
SURVEILLANCE AND RECONNAISSANCE QUADRUPED
It is a four legged walking robot. It consists of 9 links and a main frame. There are servomotors at each joint. Those servos are controlled by an microcontroller . There are two sensors PIR and proximity sensor. The PIR is used for human intervention detection and proximity sensor is used for obstacle avoidance. A camera module is being fitted so the bot to be used in reconnaissance mode and capture the images beyond. There are some sensors for control and dynamics. There are sensor like ADXLxxx ie accelerometer and gyroscope, also a GPS module is being fitted. These sensor help in motion planning.
With the help of all theses the quarduped can go anywhere and do its job stealthily.
Code
Credits
Related products


























Leave your feedback...