



Rescue Bot

Made by Latency_Zero / Environmental Sensing / Robotics / Sensors / Sustainability / IoT
About the project
Rescue Bot is an autonomous ground rover designed to navigate post-disaster terrain, locate survivors and enhance disaster response
Project info
Difficulty: Difficult
Platforms: Arduino, DFRobot, Intel, Microsoft, Raspberry Pi, ROS, Seeed Studio, Jupyter, NVIDIA, OpenCV
Estimated time: 2 days
License: MIT license (MIT)
Items used in this project
Hardware components
View all
Software apps and online services
View all
Hand tools and fabrication machines
Story
Story
The heart of our technological ambition lies in our mission to engineer a groundbreaking robot with a dual purpose, seamlessly blending safety and environmental awareness. Our vision unfolds as we conceive a robotic companion meticulously designed to revolutionize the mining industry.
Introducing "Project Rescuebot": A cutting-edge initiative driven by the imperative to enhance both the well-being of the workforce and the ecological sustainability of mining operations. At its core, our robot is a posture-perfecting sentinel, equipped with state-of-the-art sensors and algorithms meticulously crafted to accurately measure and analyze the posture of individuals working within mining environments.
But our commitment doesn't end there. Recognizing the environmental impact of mining activities, we have incorporated a sophisticated environmental monitoring system into our robotic marvel. With this system, we are capable of measuring greenhouse gas emissions within the mining environment.
"Rescue bot" is not merely a robot; it is a sentinel for the safety and health of mine workers, ensuring their well-being through posture monitoring, while concurrently championing environmental stewardship by actively measuring and mitigating greenhouse gas emissions. In this narrative of innovation, our purpose is clear: to forge a path toward a safer, more sustainable future for the mining industry and beyond.
Source :www.business-standard.com

Source :www.business-standard.com
To address this challenge, we have developed a rover that can navigate difficult terrain to locate and rescue survivors and collect essential environmental data. Additionally, the rover can be manually controlled for navigation purposes, while a manipulator mounted on top can collect soil samples and other critical items. Moreover, the rover is equipped to measure various atmospheric parameters such as equivalent calculated carbon dioxide, Total Volatile Organic Compound, relative humidity, barometric pressure, temperature and air quality. The rover can also be programmed to respond accordingly based on the situation. In disaster response and recovery efforts, the rover can deliver emergency supplies and provide a communication system for survivors to stay connected with the outside world. Furthermore, the rover can also transport aerial robots to expand the scope and effectiveness of the rescue operation, and all the software libraries used in the robot are open source (Robotic Operating System).
Our Journey
- To begin with, we conducted a thorough assessment of the total torque requirements for the motor to power the robot while bearing a minor payload.
- Subsequently, we selected a motor that satisfied the determined specifications. To enable autonomous navigation, it was crucial to opt for a motor with an encoder and an onboard encoder reader driver that transmits data via UART.
- Subsequently, we decided to employ an Arduino Mega microcontroller as a node of the master processor.
- During my initial experimentation with Raspberry Pi, we observed a significant disparity between the processing power and heat dissipation rates of the device and thus elected to transition to the Jetson Nano platform.
- In order to test the sensory equipment, we experimented with both RPLidar A2 and Intel Realsense D435i (depth camera), ultimately electing to use the depth camera due to its superior performance.
The calculation for motor selection and subsystem selection
Weight Estimation
● Driver 23gm*4=92gm
● Motor 180gm*4=720gm
● Arduino mega 37gm
● Battery 870gm
● Body 1760gm
● Buck converter 40gm
● Wheel 158gm*4=632gm
● Wire and sleeve 150gm
● Depth camera 73gm
● Jetson Nano 110gm
● Sensors and gps 100gm
Total approx Weight - 5204gm (5.204kg)(with some extra weight)
Choose the motorbased on thedatasheet below
Motor datasheet

Motor datasheet
The robot has a skid steering mechanism with 4 wheels
● To the total torque is 4*1.23Nm=4.92Nm
● Total maximum load current= 7.5A
● No load current is 0.8A
Total weight the robot can carry= Total wheel Torque/(Wheel radius*Co-efficient of friction)
Co-efficient of friction K
● For concrete 0.8
● For gravel 0.6
● Earth road dry 0.68
Now we chose a wheel with a wheel diameter of 125mm ( Radius of 0.0625m) So the total weight it can carry is = 4.92/(0.0625*0.8) Ideally it can carry 98.4 kg in concrete read but we can expect 40% of the ideal condition can carry
Motor Driver
Rhino Motion Controls DC Servo Drive RMCS-2303 with UART ASCII is a high-performance DC servo drive (10–30 V DC) designed for optimized operation of Rhino DC Servo motors with encoder feedback.
Driver datasheet

Driver datasheet
Battery
Li-Ion 11.1V 10000Mah (2C) with inbuilt charger-protection
● Discharge current upto 20A
● 12X Li-ion 3.7V 2500mAh cells (3S4P)
CAD Design
For designing we use Solidworks, Initially we start with a basic frame and motor mount like below
1 / 2 • Basic structure

Basic structure

Motor Mount
Then complete the over all structure in press fit design using 6mm acrylic sheet, After completing the structure the robot look like below.
Base Robot

Base Robot
Now we have place all the hardware properly inside the Robot, For that you can download the design file of jetson nano arduino and driver from grabcad. And then assemble the rover in solidworks.
Hardware placement

Hardware placement
After Designing we manufacture this using Lacer cutting and 3D printing.
Lacer Cutting

Lacer Cutting
After some 3D printing we got a basic structure of the rover
Rover Structure

Rover Structure
After completing the printing of all mechanical part, Ready for assembly
Parts

Parts
After complete structural assembly of the rover
1 / 2


Assembly
Now moving on to mapping section and programming.
Mapping Device Selection
We have selected RPLidar A2 M8 for 2D mapping
Now it's Time for ROS installation in Jetson nano, For that we Muhammed Zain have written a comprehensive Documentation on ROS installation on jetson nano.
For installation please do refer the Introduction to ROS 🤖 : Part 1
After Following the documentation now we have to install ROS Serial Arduino in Our Jetson Nano for that refer Rosserial Arduino : Part 2.
Now you have Successfully install ROS and ROS serial in your Jetson Nano.
Install Arduino In Jetson Nano. For that click here
Now Follow the step below for download installation.
Select Linux ARM 64 bits

Select Linux ARM 64 bits
After Downloading Extract the file and open terminal inside the arduino-1.8.19
Extract the and open terminal Here

Extract the and open terminal Here
Then type code below
sudo ./install.shYou will see a result like below
After successful installation you can see this

After successful installation you can see this
Also after opening the Arduino ide add ROS library By referring the part 2 documentation.
Now time to setup ROSSerial node.
//This is a example code fron ROSWIKI
#include <ros.h>
#include <std_msgs/String.h>
ros::NodeHandle nh;
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);
char hello[13] = "hello world!";
void setup()
{
nh.initNode();
nh.advertise(chatter);
}
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(1000);
}After this Run the code below
roscoreThen run rosserial with the port name
rosrun rosserial_python serial_node.py /dev/ttyUSB0Here the port is /dev/ttyUSB0
After this we have to receive the message on the subscriber for that enter the code below.
rostopic echo chatterThis will the return Hello World! in terminal like below.
Now We can Write the code to control the Motor that we select.
From the datasheet, all motors are controlling by each Slaves like below
Slave ID selection

Slave ID selection
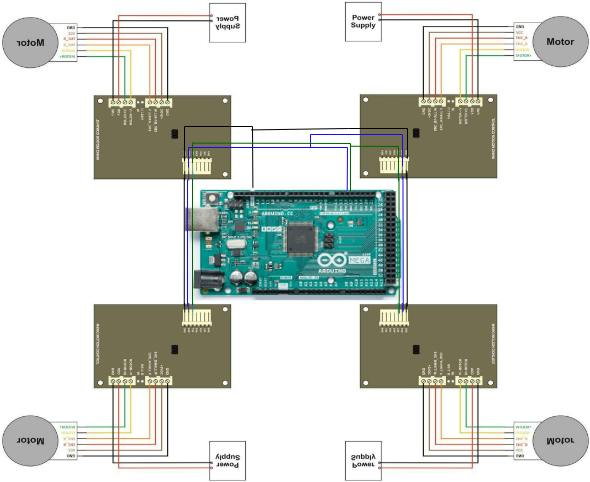
We can connect 7 motors at a time to an Arduino Mega Via UART and we can control the motor according to the PWM signal.
For Our rover we require 4 motor to manoeuvre in al terrain. accordingly we connect the motor and driver into Arduino Mega UART 2 (Rx2, Tx2).
Now it's time to Program this controller for this first refer the datasheet from Rhino
And also install the Arduino library for this driver.
Rosserial Arduino Setup For Motor Drive
Connect all four motors same as above circuit then program the circuit like below. in the below program we are controlling all the four wheel using skid steer mechanism.
#include <ros.h>
#include <RMCS2303drive.h>
#include <geometry_msgs/Twist.h>
#include <std_msgs/Int32.h>
#include "MapFloat.h"
RMCS2303 rmcs; // creation of motor driver object
// slave ids to be set on the motor driver refer to the manual in the reference section
byte slave_id1 = 1;
byte slave_id2 = 2;
byte slave_id3 = 3;
byte slave_id4 = 4;
ros::NodeHandle nh; // Node handle Object
geometry_msgs::Twist msg; // msg variable of data type twist
std_msgs::Int32 lwheel; // for storing left encoder value
std_msgs::Int32 rwheel; // for storing right encoder value
// Publisher object with topic names left_ticks and right_ticks for publishing Enc Values
ros::Publisher left_ticks("left_ticks", &lwheel);
ros::Publisher right_ticks("right_ticks", &rwheel);
// Make sure to specify the correct values here
//*******************************************
double wheel_rad = 0.0625, wheel_sep = 0.300; // wheel radius and wheel sepration in meters.
//******************************************
double w_r = 0, w_l = 0;
double speed_ang;
double speed_lin;
double leftPWM;
double rightPWM;
void messageCb(const geometry_msgs::Twist& msg) // cmd_vel callback function definition
{
speed_lin = max(min(msg.linear.x, 1.0f), -1.0f); // limits the linear x value from -1 to 1
speed_ang = max(min(msg.angular.z, 1.0f), -1.0f); // limits the angular z value from -1 to 1
// Kinematic equation for finding the left and right velocities
w_r = (speed_lin / wheel_rad) + ((speed_ang * wheel_sep) / (2.0 * wheel_rad));
w_l = (speed_lin / wheel_rad) - ((speed_ang * wheel_sep) / (2.0 * wheel_rad));
if (w_r == 0)
{
rightPWM = 0;
rmcs.Disable_Digital_Mode(slave_id1,0);
rmcs.Disable_Digital_Mode(slave_id2,0); // if right motor velocity is zero set right pwm to zero and disabling motors
rmcs.Disable_Digital_Mode(slave_id3,0);
rmcs.Disable_Digital_Mode(slave_id4,0);
}
else
rightPWM = mapFloat(fabs(w_r), 0.0, 18.0, 1500,17200); // mapping the right wheel velocity with respect to Motor PWM values
if (w_l == 0)
{
leftPWM = 0;
rmcs.Disable_Digital_Mode(slave_id1,0);
rmcs.Disable_Digital_Mode(slave_id2,0); // if left motor velocity is zero set left pwm to zero and disabling motors
rmcs.Disable_Digital_Mode(slave_id3,0);
rmcs.Disable_Digital_Mode(slave_id4,0);
}
else
leftPWM = mapFloat(fabs(w_l), 0.0, 18.0, 1500,
17200); // mapping the right wheel velocity with respect to Motor PWM values
rmcs.Speed(slave_id1,rightPWM);
rmcs.Speed(slave_id2,rightPWM);
rmcs.Speed(slave_id3,leftPWM);
rmcs.Speed(slave_id4,leftPWM);
if (w_r > 0 && w_l > 0)
{
rmcs.Enable_Digital_Mode(slave_id1,1);
rmcs.Enable_Digital_Mode(slave_id2,1); // forward condition
rmcs.Enable_Digital_Mode(slave_id3,0);
rmcs.Enable_Digital_Mode(slave_id4,0);
}
else if (w_r < 0 && w_l < 0)
{
rmcs.Enable_Digital_Mode(slave_id1,0);
rmcs.Enable_Digital_Mode(slave_id2,0); // backward condition
rmcs.Enable_Digital_Mode(slave_id3,1);
rmcs.Enable_Digital_Mode(slave_id4,1);
}
else if (w_r > 0 && w_l < 0)
{
rmcs.Enable_Digital_Mode(slave_id1,1);
rmcs.Enable_Digital_Mode(slave_id2,1); // Leftward condition
rmcs.Enable_Digital_Mode(slave_id3,1);
rmcs.Enable_Digital_Mode(slave_id4,1);
}
else if (w_r < 0 && w_l > 0)
{
rmcs.Enable_Digital_Mode(slave_id1,0);
rmcs.Enable_Digital_Mode(slave_id2,0); // rightward condition
rmcs.Enable_Digital_Mode(slave_id3,0);
rmcs.Enable_Digital_Mode(slave_id4,0);
}
else
{
rmcs.Brake_Motor(slave_id1,0);
rmcs.Brake_Motor(slave_id2,0);
rmcs.Brake_Motor(slave_id3,0);
rmcs.Brake_Motor(slave_id4,0); // if none of the above break the motors both in clockwise n anti-clockwise direction
rmcs.Brake_Motor(slave_id1,1);
rmcs.Brake_Motor(slave_id2,1);
rmcs.Brake_Motor(slave_id3,1);
rmcs.Brake_Motor(slave_id4,1);
}
}
ros::Subscriber<geometry_msgs::Twist> sub("cmd_vel",&messageCb); // creation of subscriber object sub for recieving the cmd_vel
void setup()
{
rmcs.Serial_selection(0); // 0 -> for Harware serial tx1 rx1 of arduino mega
rmcs.Serial0(9600);
rmcs.begin(&Serial2, 9600);
nh.initNode(); // initialzing the node handle object
nh.subscribe(sub); // subscribing to cmd vel with sub object
nh.advertise(left_ticks); // advertise the left_ticks topic
nh.advertise(right_ticks); // advertise the left_ticks topic
}
void loop()
{
lwheel.data =
rmcs.Position_Feedback(slave_id4); // the function reads the encoder value from the motor with slave id 4
rwheel.data =
-rmcs.Position_Feedback(slave_id2); // the function reads the encoder value from the motor with slave id 4
left_ticks.publish(&lwheel); // publish left enc values
right_ticks.publish(&rwheel); // publish right enc values
nh.spinOnce();
}For the above code refer Jerin Peter's documentation
After uploading this code to Arduino mega and wiring you have to install teleop twist keyboard using the below comment.
sudo apt-get install ros-melodic-teleop-twist-keyboardThen Run
roscoreThen run the serial node by entering the comment below
rosrun rosserial_python serial_node.py /dev/ttyACM0At this time you will get an error like the permission denied at that time enter the below comment and then type the comment that shown above,
sudo chmod 777 /dev/ttyACM0Now our subscriber is ready to receive the cmd_vel (comment velocity).
Then we have to run the publisher node that is teleop twist keyboard. For that Run the Code below.
rosrun teleop_twist_keyboard teleop_twist_keyboard.pyThen by using the keyboard control you will get a result like below.
Motor TestAlso now check the working with The over all robot
Initial testingAfter this testing we found that we have to add a triangulation member of top of each wheel to make the rover more structurally stable like below.
Weak point

Weak point
For to avoid the breaking added member
Added Member

Added Member
This member make the structure strong.
Now connect the lidar with jetson nano and visualise the data in Rviz
Now install the Rp lidar package for ROS, that open terminal and type the comment below.
cd catkin_ws/srcThen clone the github repo here, for cloning enter the comment below.
git clone https://github.com/robopeak/rplidar_rosAfter successful cloning you will get a result like below.
Installation of rplidar_ros

Installation of rplidar_ros
Then make the workspace by moving back to catkin_ws, Then type
catkin_makeThis will make the sourced file
After this we want to run the rplidar_viewer, for that enter the code below
roslaunch rplidar_ros view_rplidar.launchthis will result like below, if you found any error give the permission to the port and run the above comment again.
view_rplidar running

view_rplidar running
this will also give a result on rviz like below
rplidar ViewerIMU Sensor Setup(BNO 055)
Connection
- Connect BNO055 Vin to pin 17 (3.3V) of the Jetson Nano.
- Connect BNO055 GND to pin 25 (GND) of the Jetson Nano.
- Connect BNO055 SDA to pin 3 (SDA) of the Jetson Nano.
- Connect BNO055 SCL to pin 5 (SCL) of the Jetson Nano.
To setup and install go to the workspace by entering the below comment
cd ~/catkin_ws/srcThen clone the repository
git clone https://github.com/dheera/ros-imu-bno055.gitAlso, for visualisation of IMU data in RVIZ install theIMU plugin using the below comment.
sudo apt-get install ros-melodic-rviz-imu-pluginAfter this make the the newly installed package, for that go back to the workspace by entering the below comment.
cd ~/catkin_ws/Then make the package using the below comment
catkin_makeNow you successfully install the bno055 ROS package.
For to execute this, We have to run
roscoreThen execute a the static tf publisher for that enter the comment below
rosrun tf static_transform_publisher 0 0 0 0 0 0 imuNow, launch the IMU by entering the comment below.
roslaunch imu_bno055 imu.launchNow we can see the data from our imu sensor on another terminal using the comment below
rostopic echo /imu/dataThen open the Rviz
rvizThen, Change the frame to imu.
Click the Add button in the bottom left of rviz window.
Click imu under rviz_imu_plugin.
Click ok.
Change the topic of the imu to /imu/data.
Now you can see the result like beow.
IMU data visualization in rvizNow we setup basic sensor and all all actuator, Now the Time for mapping.
For Mapping initially we tried with Gmapping But due to the higher reliability of map on inaccurate wheel odometry map was getting distorted. So we move on with Hector mapping.
For installation goto workspace
cd ~/catkin_ws/srcThen clone the repository
git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.gitNow go back to catkin_ws and make the package.
For to edit the parameter we have to goto the mapping_default.launch file.
sudo gedit ~/catkin_ws/src/hector_slam/hector_mapping/launch/mapping_default.launchAnd Edit the file like below.
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="nav"/>to
<arg name="base_frame" default="base_link"/>
<arg name="odom_frame" default="base_link"/>Also,
<!--<node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 map nav 100"/>-->Remove the comment and add the cordinate
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0.05228 0 0.1296 0 0 0 base_link laser 100"/>Then save this file.
Now map the environment.
For this Run
roscore
rosrun rosserial_python serial_node.py /dev/ttyACM0
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
roslaunch rplidar_ros rplidar.launch
roslaunch hector_mapping mapping_default.launch
rvizThen on the left bottom click on Add then goto by topic then add map.
Then navigate the robot using teleop and map the area, After successful mapping you will get a map of you environment like below in RVIZ.
Video of mapping
Hector mappingFinal Map
Map of our college Basketball Court

Map of our college Basketball Court
For to save this map enter the comment below:
rosrun map_server map_saver -f mapnamethen it will save the map.
Now we can setup the navigation stack, For that we Are using move_base and amcl, Also setup the driver train controller.
for to launch the tf_control use the below launch file
<launch>
<!-- odometry-ish-->
<param name="~base_frame_id" value="base_footprint"/>
<param name="~odom_frame_id" value="odom"/>
<param name="encoder_min" value="-1073741824"/>
<param name="encoder_max" value="1073741824"/>
<param name="ticks_meter" value="913683" />
<param name="~base_width" value="0.41" />
<node pkg="differential_drive" type="diff_tf.py" name="diff_drive" output="screen">
<!-- <remap from="/odom" to="/wheelodom"/> -->
</node>
<node pkg="tf2_ros" type="static_transform_publisher" name="base_footprint_to_base_link" args="0 0 0.15 0 0 0 /base_footprint /base_link"/>
</launch>Also add the standard differential tf python code in the same workspace.
#!/usr/bin/env python
"""
diff_tf.py - follows the output of a wheel encoder and
creates tf and odometry messages.
some code borrowed from the arbotix diff_controller script
A good reference: http://rossum.sourceforge.net/papers/DiffSteer/
Copyright (C) 2012 Jon Stephan.
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
----------------------------------
Portions of this code borrowed from the arbotix_python diff_controller.
diff_controller.py - controller for a differential drive
Copyright (c) 2010-2011 Vanadium Labs LLC. All right reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
* Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
* Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
* Neither the name of Vanadium Labs LLC nor the names of its
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL VANADIUM LABS BE LIABLE FOR ANY DIRECT, INDIRECT,
INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA,
OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF
LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE
OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF
ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
"""
import rospy
import roslib
#roslib.load_manifest('differential_drive')
from math import sin, cos, pi
from geometry_msgs.msg import Quaternion
from geometry_msgs.msg import Twist
from nav_msgs.msg import Odometry
from tf.broadcaster import TransformBroadcaster
from std_msgs.msg import Int32
#############################################################################
class DiffTf:
#############################################################################
#############################################################################
def __init__(self):
#############################################################################
rospy.init_node("diff_tf")
self.nodename = rospy.get_name()
rospy.loginfo("-I- %s started" % self.nodename)
#### parameters #######
self.rate = rospy.get_param('~rate',10.0) # the rate at which to publish the transform
self.ticks_meter = float(rospy.get_param('ticks_meter', 612377)) # The number of wheel encoder ticks per meter of travel
self.base_width = float(rospy.get_param('~base_width', 0.245)) # The wheel base width in meters
self.base_frame_id = rospy.get_param('~base_frame_id','base_link') # the name of the base frame of the robot
self.odom_frame_id = rospy.get_param('~odom_frame_id', 'odom') # the name of the odometry reference frame
self.encoder_min = rospy.get_param('encoder_min', -32768)
self.encoder_max = rospy.get_param('encoder_max', 32768)
self.encoder_low_wrap = rospy.get_param('wheel_low_wrap', (self.encoder_max - self.encoder_min) * 0.3 + self.encoder_min )
self.encoder_high_wrap = rospy.get_param('wheel_high_wrap', (self.encoder_max - self.encoder_min) * 0.7 + self.encoder_min )
self.t_delta = rospy.Duration(1.0/self.rate)
self.t_next = rospy.Time.now() + self.t_delta
# internal data
self.enc_left = None # wheel encoder readings
self.enc_right = None
self.left = 0 # actual values coming back from robot
self.right = 0
self.lmult = 0
self.rmult = 0
self.prev_lencoder = 0
self.prev_rencoder = 0
self.x = 0 # position in xy plane
self.y = 0
self.th = 0
self.dx = 0 # speeds in x/rotation
self.dr = 0
self.then = rospy.Time.now()
# subscriptions
rospy.Subscriber("left_ticks", Int32, self.lwheelCallback)
rospy.Subscriber("right_ticks", Int32, self.rwheelCallback)
self.odomPub = rospy.Publisher("odom", Odometry,queue_size=10)
self.odomBroadcaster = TransformBroadcaster()
#############################################################################
def spin(self):
#############################################################################
r = rospy.Rate(self.rate)
while not rospy.is_shutdown():
self.update()
r.sleep()
#############################################################################
def update(self):
#############################################################################
now = rospy.Time.now()
if now > self.t_next:
elapsed = now - self.then
self.then = now
elapsed = elapsed.to_sec()
# calculate odometry
if self.enc_left == None:
d_left = 0
d_right = 0
else:
d_left = (self.left - self.enc_left) / self.ticks_meter
d_right = (self.right - self.enc_right) / self.ticks_meter
self.enc_left = self.left
self.enc_right = self.right
# distance traveled is the average of the two wheels
d = ( d_left + d_right ) / 2
# this approximation works (in radians) for small angles
th = ( d_right - d_left ) / self.base_width
# calculate velocities
self.dx = d / elapsed
self.dr = th / elapsed
if (d != 0):
# calculate distance traveled in x and y
x = cos( th ) * d
y = -sin( th ) * d
# calculate the final position of the robot
self.x = self.x + ( cos( self.th ) * x - sin( self.th ) * y )
self.y = self.y + ( sin( self.th ) * x + cos( self.th ) * y )
if( th != 0):
self.th = self.th + th
# publish the odom information
quaternion = Quaternion()
quaternion.x = 0.0
quaternion.y = 0.0
quaternion.z = sin( self.th / 2 )
quaternion.w = cos( self.th / 2 )
self.odomBroadcaster.sendTransform(
(self.x, self.y, 0),
(quaternion.x, quaternion.y, quaternion.z, quaternion.w),
rospy.Time.now(),
self.base_frame_id,
self.odom_frame_id
)
odom = Odometry()
odom.header.stamp = now
odom.header.frame_id = self.odom_frame_id
odom.pose.pose.position.x = self.x
odom.pose.pose.position.y = self.y
odom.pose.pose.position.z = 0
odom.pose.pose.orientation = quaternion
odom.child_frame_id = self.base_frame_id
odom.twist.twist.linear.x = self.dx
odom.twist.twist.linear.y = 0
odom.twist.twist.angular.z = self.dr
self.odomPub.publish(odom)
#############################################################################
def lwheelCallback(self, msg):
#############################################################################
enc = msg.data
if (enc < self.encoder_low_wrap and self.prev_lencoder > self.encoder_high_wrap):
self.lmult = self.lmult + 1
if (enc > self.encoder_high_wrap and self.prev_lencoder < self.encoder_low_wrap):
self.lmult = self.lmult - 1
self.left = 1.0 * (enc + self.lmult * (self.encoder_max - self.encoder_min))
self.prev_lencoder = enc
#############################################################################
def rwheelCallback(self, msg):
#############################################################################
enc = msg.data
if(enc < self.encoder_low_wrap and self.prev_rencoder > self.encoder_high_wrap):
self.rmult = self.rmult + 1
if(enc > self.encoder_high_wrap and self.prev_rencoder < self.encoder_low_wrap):
self.rmult = self.rmult - 1
self.right = 1.0 * (enc + self.rmult * (self.encoder_max - self.encoder_min))
self.prev_rencoder = enc
#############################################################################
#############################################################################
if __name__ == '__main__':
""" main """
diffTf = DiffTf()
diffTf.spin()Then add Move_base to the workspace
For that refer the official documentation from ROS Wiki.
Then also add amcl along with the move base in the same workspace
Also there will be a standerd pathplaning that come along which is called TEB.
This come with all in one package from ROS Link.
Now we are good to go but we have to fuse the wheel odom, imu and lidar for that refer to Addsion documentation on Sensor Fusion Using the ROS Robot Pose EKF Package.
Now we can execute all the file for the Autonomous navigation.
roscore
roslaunch hector_mapping mapping_default.launch
sudo chmod 777 /dev/ttyUSB0
roslaunch rplidar_ros rplidar.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
sudo chmod 777 /dev/ttyACM0
rosrun rosserial_python serial_node.py /dev/ttyACM0
roslaunch hector_mapping mapping_default.launch
roslaunch differential_drive tf_controller.launch
roslaunch navigation move_base.launch
roslaunch navigation amcl.launch
rosrun map_server map_server mapname.yaml
rvizFull execution video of autonomous navigation
Navigation 1Navigation 2Testing in outdoor in multiple terrain
Terrain 1
Terrain 1Terrain 2
Terrain 2Terrain 3
Terrain 3Now to improve the Path panning we introduce A* Algorithm
Path Planning using A* Algorithm
Step 1: Write a global planner
catkin_create_pkg relaxed astar nav_core roscpp rospy std_msgsStep 2: Write the corresponding header files and source files under the function package
We named it as RAstar_ros.h
#include <netdb.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <unistd.h>
#include <string>
/** include ros libraries**********************/
#include <actionlib/client/simple_action_client.h>
#include <geometry_msgs/PoseStamped.h>
#include <geometry_msgs/PoseWithCovarianceStamped.h>
#include <geometry_msgs/Twist.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <move_base_msgs/MoveBaseActionGoal.h>
#include <move_base_msgs/MoveBaseGoal.h>
#include <nav_msgs/GetPlan.h>
#include <nav_msgs/OccupancyGrid.h>
#include <nav_msgs/Odometry.h>
#include <nav_msgs/Path.h>
#include <ros/ros.h>
#include <tf/tf.h>
#include <tf/transform_datatypes.h>
#include <tf/transform_listener.h>
#include "sensor_msgs/LaserScan.h"
#include "sensor_msgs/PointCloud2.h"
/** ********************************************/
#include <boost/foreach.hpp>
//#define forEach BOOST_FOREACH
/** for global path planner interface */
#include <angles/angles.h>
#include <costmap_2d/costmap_2d.h>
#include <costmap_2d/costmap_2d_ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_core/base_global_planner.h>
//#include <pcl_conversions/pcl_conversions.h>
#include <base_local_planner/costmap_model.h>
#include <base_local_planner/world_model.h>
#include <set>
using namespace std;
using std::string;
#ifndef RASTAR_ROS_CPP
#define RASTAR_ROS_CPP
/**
* @struct cells
* @brief A struct that represents a cell and its fCost.
*/
struct cells {
int currentCell;
float fCost;
};
// STEP1-2.your class should inherits from the interface
// "nav_core::BaseGlobalPlanner"
namespace RAstar_planner {
class RAstarPlannerROS : public nav_core::BaseGlobalPlanner {
public:
RAstarPlannerROS(ros::NodeHandle&); // this constructor is may be not needed
RAstarPlannerROS();
RAstarPlannerROS(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
ros::NodeHandle ROSNodeHandle;
/** 公有继承 nav_core::BaseGlobalPlanner 接口 **/
/** overriden classes from interface nav_core::BaseGlobalPlanner **/
void initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
bool makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan);
void getCorrdinate(float& x, float& y);
int convertToCellIndex(float x, float y);
void convertToCoordinate(int index, float& x, float& y);
bool isCellInsideMap(float x, float y);
void mapToWorld(double mx, double my, double& wx, double& wy);
vector<int> RAstarPlanner(int startCell, int goalCell);
vector<int> findPath(int startCell, int goalCell, float g_score[]);
vector<int> constructPath(int startCell, int goalCell, float g_score[]);
float calculateHCost(int cellID, int goalCell) {
int x1 = getCellRowID(goalCell);
int y1 = getCellColID(goalCell);
int x2 = getCellRowID(cellID);
int y2 = getCellColID(cellID);
return abs(x1 - x2) + abs(y1 - y2);
// return min(abs(x1-x2),abs(y1-y2))*sqrt(2) +
// max(abs(x1-x2),abs(y1-y2))-min(abs(x1-x2),abs(y1-y2));
}
void addNeighborCellToOpenList(multiset<cells>& OPL, int neighborCell,
int goalCell, float g_score[]);
vector<int> findFreeNeighborCell(int CellID);
bool isStartAndGoalCellsValid(int startCell, int goalCell);
float getMoveCost(int CellID1, int CellID2);
float getMoveCost(int i1, int j1, int i2, int j2);
bool isFree(int CellID); // returns true if the cell is Free
bool isFree(int i, int j);
int getCellIndex(int i,
int j) // get the index of the cell to be used in Path
{
return (i * width) + j;
}
int getCellRowID(int index) // get the row ID from cell index
{
return index / width;
}
int getCellColID(int index) // get colunm ID from cell index
{
return index % width;
}
float originX;
float originY;
float resolution;
costmap_2d::Costmap2DROS* costmap_ros_;
double step_size_, min_dist_from_robot_;
costmap_2d::Costmap2D* costmap_;
// base_local_planner::WorldModel* world_model_;
bool initialized_;
int width;
int height;
};
}; // namespace RAstar_planner
#endifStep 3: Creating the C++ file
- The core ROS libraries required by the path planner need to be included. The path planner needs to use <costmap_2d/costmap_2d_ros.h> and <costmap_2d/costmap_2d.h> and the costmap 2d::Costmap2D class is used as a input map class. When defined as a plugin, the route planner class will automatically have access to this map.
- <nav_core/base_global_planner.h> is used to import the interface nav_core::BaseGlobalPlanner, which is the parent class that the plug-in must inherit.
- Then improve the initialize and makePlan functions in the cpp file.RAstar_ros.cpp
#include <netdb.h>
#include <netinet/in.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <unistd.h>
#include <fstream>
#include <iomanip>
#include <iostream>
#include <string>
// STEP1-1.include core ROS libraries -> nav_core roscpp rospy std_msgs
#include "RAstar_ros.h"
// STEP1-4.include <pluginlib/class_list_macros.h>
#include <pluginlib/class_list_macros.h>
// register this planner as a BaseGlobalPlanner plugin
/*注册一个插件
STEP1-5.register this planner as a BaseGlobalPlanner plugin by adding
PLUGINLIB_EXPORT_CLASS(RAstar_planner::RAstarPlannerROS,nav_core::BaseGlobalPlanner)*/
PLUGINLIB_EXPORT_CLASS(RAstar_planner::RAstarPlannerROS,
nav_core::BaseGlobalPlanner)
int value;
int mapSize;
bool* OGM;
static const float INFINIT_COST = INT_MAX; //!< cost of non connected nodes
float infinity = std::numeric_limits<float>::infinity();
float tBreak; // coefficient for breaking ties
ofstream MyExcelFile("RA_result.xlsx", ios::trunc);
int clock_gettime(clockid_t clk_id, struct timespect* tp);
timespec diff(timespec start, timespec end) {
timespec temp;
if ((end.tv_nsec - start.tv_nsec) < 0) {
temp.tv_sec = end.tv_sec - start.tv_sec - 1;
temp.tv_nsec = 1000000000 + end.tv_nsec - start.tv_nsec;
} else {
temp.tv_sec = end.tv_sec - start.tv_sec;
temp.tv_nsec = end.tv_nsec - start.tv_nsec;
}
return temp;
}
inline vector<int> findFreeNeighborCell(int CellID);
namespace RAstar_planner {
// Default Constructor
RAstarPlannerROS::RAstarPlannerROS() {}
RAstarPlannerROS::RAstarPlannerROS(ros::NodeHandle& nh) { ROSNodeHandle = nh; }
// STEP1-3.overriden the methods "initialize" and "makePlan"
RAstarPlannerROS::RAstarPlannerROS(std::string name,
costmap_2d::Costmap2DROS* costmap_ros) {
initialize(name, costmap_ros);
}
void RAstarPlannerROS::initialize(std::string name,
costmap_2d::Costmap2DROS* costmap_ros) {
if (!initialized_) {
costmap_ros_ = costmap_ros;
costmap_ = costmap_ros_->getCostmap();
ros::NodeHandle private_nh("~/" + name);
originX = costmap_->getOriginX();
originY = costmap_->getOriginY();
width = costmap_->getSizeInCellsX();
height = costmap_->getSizeInCellsY();
resolution = costmap_->getResolution();
mapSize = width * height;
tBreak = 1 + 1 / (mapSize);
value = 0;
OGM = new bool[mapSize];
for (unsigned int iy = 0; iy < costmap_->getSizeInCellsY(); iy++) {
for (unsigned int ix = 0; ix < costmap_->getSizeInCellsX(); ix++) {
unsigned int cost = static_cast<int>(costmap_->getCost(ix, iy));
// cout<<cost;
if (cost == 0)
OGM[iy * width + ix] = true;
else
OGM[iy * width + ix] = false;
}
}
MyExcelFile << "StartIDtStartXtStartYtGoalIDtGoalXtGoalYtPlannertime("
"ms)tpathLengthtnumberOfCellst"
<< endl;
ROS_INFO("RAstar planner initialized successfully");
initialized_ = true;
} else
ROS_WARN("This planner has already been initialized... doing nothing");
}
// STEP1-3.1Here we override the "makePlan" method,in which you should write or
// call your path planning algorithm
bool RAstarPlannerROS::makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan) {
if (!initialized_) {
ROS_ERROR(
"The planner has not been initialized, please call initialize() to use "
"the planner");
return false;
}
ROS_DEBUG("Got a start: %.2f, %.2f, and a goal: %.2f, %.2f",
start.pose.position.x, start.pose.position.y, goal.pose.position.x,
goal.pose.position.y);
plan.clear();
if (goal.header.frame_id != costmap_ros_->getGlobalFrameID()) {
ROS_ERROR(
"This planner as configured will only accept goals in the %s frame, "
"but a goal was sent in the %s frame.",
costmap_ros_->getGlobalFrameID().c_str(), goal.header.frame_id.c_str());
return false;
}
tf::Stamped<tf::Pose> goal_tf;
tf::Stamped<tf::Pose> start_tf;
poseStampedMsgToTF(goal, goal_tf);
poseStampedMsgToTF(start, start_tf);
// convert the start and goal positions
float startX = start.pose.position.x;
float startY = start.pose.position.y;
float goalX = goal.pose.position.x;
float goalY = goal.pose.position.y;
getCorrdinate(startX, startY);
getCorrdinate(goalX, goalY);
int startCell;
int goalCell;
if (isCellInsideMap(startX, startY) && isCellInsideMap(goalX, goalY)) {
startCell = convertToCellIndex(startX, startY);
goalCell = convertToCellIndex(goalX, goalY);
MyExcelFile << startCell << "t" << start.pose.position.x << "t"
<< start.pose.position.y << "t" << goalCell << "t"
<< goal.pose.position.x << "t" << goal.pose.position.y;
} else {
ROS_WARN("the start or goal is out of the map");
return false;
}
/////////////////////////////////////////////////////////
// call relaxed Astar global planner
if (isStartAndGoalCellsValid(startCell, goalCell)) {
vector<int> bestPath;
bestPath.clear();
//两个参数为起始点和终点
bestPath = RAstarPlanner(startCell, goalCell);
// if the global planner find a path
if (bestPath.size() > 0) {
// convert the path
for (int i = 0; i < bestPath.size(); i++) {
float x = 0.0;
float y = 0.0;
int index = bestPath[i];
convertToCoordinate(index, x, y);
geometry_msgs::PoseStamped pose = goal;
// your path should be stored in the "plan" vector
pose.pose.position.x = x;
pose.pose.position.y = y;
pose.pose.position.z = 0.0;
pose.pose.orientation.x = 0.0;
pose.pose.orientation.y = 0.0;
pose.pose.orientation.z = 0.0;
pose.pose.orientation.w = 1.0;
plan.push_back(pose);
}
float path_length = 0.0;
std::vector<geometry_msgs::PoseStamped>::iterator it = plan.begin();
geometry_msgs::PoseStamped last_pose;
last_pose = *it;
it++;
for (; it != plan.end(); ++it) {
path_length += hypot((*it).pose.position.x - last_pose.pose.position.x,
(*it).pose.position.y - last_pose.pose.position.y);
last_pose = *it;
}
cout << "The global path length: " << path_length << " meters" << endl;
MyExcelFile << "t" << path_length << "t" << plan.size() << endl;
// publish the plan
return true;
}
else {
ROS_WARN("The planner failed to find a path, choose other goal position");
return false;
}
}
else {
ROS_WARN("Not valid start or goal");
return false;
}
}
void RAstarPlannerROS::getCorrdinate(float& x, float& y) {
x = x - originX;
y = y - originY;
}
int RAstarPlannerROS::convertToCellIndex(float x, float y) {
int cellIndex;
float newX = x / resolution;
float newY = y / resolution;
cellIndex = getCellIndex(newY, newX);
return cellIndex;
}
void RAstarPlannerROS::convertToCoordinate(int index, float& x, float& y) {
x = getCellColID(index) * resolution;
y = getCellRowID(index) * resolution;
x = x + originX;
y = y + originY;
}
bool RAstarPlannerROS::isCellInsideMap(float x, float y) {
bool valid = true;
if (x > (width * resolution) || y > (height * resolution)) valid = false;
return valid;
}
void RAstarPlannerROS::mapToWorld(double mx, double my, double& wx,
double& wy) {
costmap_2d::Costmap2D* costmap = costmap_ros_->getCostmap();
wx = costmap->getOriginX() + mx * resolution;
wy = costmap->getOriginY() + my * resolution;
}
vector<int> RAstarPlannerROS::RAstarPlanner(int startCell, int goalCell) {
vector<int> bestPath;
// float g_score [mapSize][2];
float g_score[mapSize];
for (uint i = 0; i < mapSize; i++) g_score[i] = infinity;
timespec time1, time2;
/* take current time here */
clock_gettime(CLOCK_PROCESS_CPUTIME_ID, &time1);
bestPath = findPath(startCell, goalCell, g_score);
clock_gettime(CLOCK_PROCESS_CPUTIME_ID, &time2);
cout << "time to generate best global path by Relaxed A* = "
<< (diff(time1, time2).tv_sec) * 1e3 +
(diff(time1, time2).tv_nsec) * 1e-6
<< " microseconds" << endl;
MyExcelFile << "t"
<< (diff(time1, time2).tv_sec) * 1e3 +
(diff(time1, time2).tv_nsec) * 1e-6;
return bestPath;
}
/*******************************************************************************/
// Function Name: findPath
// Inputs: the map layout, the start and the goal Cells and a boolean to
// indicate if we will use break ties or not Output: the best path Description:
// it is used to generate the robot free path
/*********************************************************************************/
vector<int> RAstarPlannerROS::findPath(int startCell, int goalCell,
float g_score[]) {
value++;
vector<int> bestPath;
vector<int> emptyPath;
cells CP;
multiset<cells> OPL;
int currentCell;
// calculate g_score and f_score of the start position
g_score[startCell] = 0;
CP.currentCell = startCell;
CP.fCost = g_score[startCell] + calculateHCost(startCell, goalCell);
// add the start cell to the open list
OPL.insert(CP);
currentCell = startCell;
// while the open list is not empty continuie the search or g_score(goalCell)
// is equal to infinity
while (!OPL.empty() && g_score[goalCell] == infinity) {
// choose the cell that has the lowest cost fCost in the open set which is
// the begin of the multiset
currentCell = OPL.begin()->currentCell;
// remove the currentCell from the openList
OPL.erase(OPL.begin());
// search the neighbors of the current Cell
vector<int> neighborCells;
neighborCells = findFreeNeighborCell(currentCell);
for (uint i = 0; i < neighborCells.size();
i++) // for each neighbor v of current cell
{
// if the g_score of the neighbor is equal to INF: unvisited cell
if (g_score[neighborCells[i]] == infinity) {
g_score[neighborCells[i]] =
g_score[currentCell] + getMoveCost(currentCell, neighborCells[i]);
addNeighborCellToOpenList(OPL, neighborCells[i], goalCell, g_score);
} // end if
} // end for
} // end while
if (g_score[goalCell] !=
infinity) // if g_score(goalcell)==INF : construct path
{
bestPath = constructPath(startCell, goalCell, g_score);
return bestPath;
} else {
cout << "Failure to find a path !" << endl;
return emptyPath;
}
}
/*******************************************************************************/
// Function Name: constructPath
// Inputs: the start and the goal Cells
// Output: the best path
// Description: it is used to construct the robot path
/*********************************************************************************/
vector<int> RAstarPlannerROS::constructPath(int startCell, int goalCell,
float g_score[]) {
vector<int> bestPath;
vector<int> path;
path.insert(path.begin() + bestPath.size(), goalCell);
int currentCell = goalCell;
while (currentCell != startCell) {
vector<int> neighborCells;
neighborCells = findFreeNeighborCell(currentCell);
vector<float> gScoresNeighbors;
for (uint i = 0; i < neighborCells.size(); i++)
gScoresNeighbors.push_back(g_score[neighborCells[i]]);
int posMinGScore =
distance(gScoresNeighbors.begin(),
min_element(gScoresNeighbors.begin(), gScoresNeighbors.end()));
currentCell = neighborCells[posMinGScore];
// insert the neighbor in the path
path.insert(path.begin() + path.size(), currentCell);
}
for (uint i = 0; i < path.size(); i++)
bestPath.insert(bestPath.begin() + bestPath.size(),
path[path.size() - (i + 1)]);
return bestPath;
}
/*******************************************************************************/
// Function Name: calculateHCost
// Inputs:the cellID and the goalCell
// Output: the distance between the current cell and the goal cell
// Description: it is used to calculate the hCost
/*********************************************************************************/
/*
float RAstarPlannerROS::calculateHCost(int cellID, int goalCell)
{
int x1=getCellRowID(goalCell);
int y1=getCellColID(goalCell);
int x2=getCellRowID(cellID);
int y2=getCellColID(cellID);
//if(getNeighborNumber()==4)
//The diagonal shortcut distance between two grid points (x1,y1) and (x2,y2)
is:
// return min(abs(x1-x2),abs(y1-y2))*sqrt(2) +
max(abs(x1-x2),abs(y1-y2))-min(abs(x1-x2),abs(y1-y2));
//else
//manhatten distance for 8 neighbor
return abs(x1-x2)+abs(y1-y2);
}
*/
/*******************************************************************************/
// Function Name: addNeighborCellToOpenList
// Inputs: the open list, the neighbors Cell, the g_score matrix, the goal cell
// Output:
// Description: it is used to add a neighbor Cell to the open list
/*********************************************************************************/
void RAstarPlannerROS::addNeighborCellToOpenList(multiset<cells>& OPL,
int neighborCell, int goalCell,
float g_score[]) {
cells CP;
CP.currentCell = neighborCell; // insert the neighbor cell
CP.fCost = g_score[neighborCell] + calculateHCost(neighborCell, goalCell);
OPL.insert(CP);
// multiset<cells>::iterator it = OPL.lower_bound(CP);
// multiset<cells>::iterator it = OPL.upper_bound(CP);
// OPL.insert( it, CP );
}
/*******************************************************************************
* Function Name: findFreeNeighborCell
* Inputs: the row and columun of the current Cell
* Output: a vector of free neighbor cells of the current cell
* Description:it is used to find the free neighbors Cells of a the current Cell
*in the grid Check Status: Checked by Anis, Imen and Sahar
*********************************************************************************/
vector<int> RAstarPlannerROS::findFreeNeighborCell(int CellID) {
int rowID = getCellRowID(CellID);
int colID = getCellColID(CellID);
int neighborIndex;
vector<int> freeNeighborCells;
for (int i = -1; i <= 1; i++)
for (int j = -1; j <= 1; j++) {
// check whether the index is valid
if ((rowID + i >= 0) && (rowID + i < height) && (colID + j >= 0) &&
(colID + j < width) && (!(i == 0 && j == 0))) {
neighborIndex = getCellIndex(rowID + i, colID + j);
if (isFree(neighborIndex)) freeNeighborCells.push_back(neighborIndex);
}
}
return freeNeighborCells;
}
/*******************************************************************************/
// Function Name: isStartAndGoalCellsValid
// Inputs: the start and Goal cells
// Output: true if the start and the goal cells are valid
// Description: check if the start and goal cells are valid
/*********************************************************************************/
bool RAstarPlannerROS::isStartAndGoalCellsValid(int startCell, int goalCell) {
bool isvalid = true;
bool isFreeStartCell = isFree(startCell);
bool isFreeGoalCell = isFree(goalCell);
if (startCell == goalCell) {
// cout << "The Start and the Goal cells are the same..." << endl;
isvalid = false;
} else {
if (!isFreeStartCell && !isFreeGoalCell) {
// cout << "The start and the goal cells are obstacle positions..." <<
// endl;
isvalid = false;
} else {
if (!isFreeStartCell) {
// cout << "The start is an obstacle..." << endl;
isvalid = false;
} else {
if (!isFreeGoalCell) {
// cout << "The goal cell is an obstacle..." << endl;
isvalid = false;
} else {
if (findFreeNeighborCell(goalCell).size() == 0) {
// cout << "The goal cell is encountred by obstacles... "<< endl;
isvalid = false;
} else {
if (findFreeNeighborCell(startCell).size() == 0) {
// cout << "The start cell is encountred by obstacles... "<< endl;
isvalid = false;
}
}
}
}
}
}
return isvalid;
}
float RAstarPlannerROS::getMoveCost(int i1, int j1, int i2, int j2) {
float moveCost = INFINIT_COST; // start cost with maximum value. Change it to
// real cost of cells are connected
// if cell2(i2,j2) exists in the diagonal of cell1(i1,j1)
if ((j2 == j1 + 1 && i2 == i1 + 1) || (i2 == i1 - 1 && j2 == j1 + 1) ||
(i2 == i1 - 1 && j2 == j1 - 1) || (j2 == j1 - 1 && i2 == i1 + 1)) {
// moveCost = DIAGONAL_MOVE_COST;
moveCost = 1.4;
}
// if cell 2(i2,j2) exists in the horizontal or vertical line with
// cell1(i1,j1)
else {
if ((j2 == j1 && i2 == i1 - 1) || (i2 == i1 && j2 == j1 - 1) ||
(i2 == i1 + 1 && j2 == j1) || (i1 == i2 && j2 == j1 + 1)) {
// moveCost = MOVE_COST;
moveCost = 1;
}
}
return moveCost;
}
float RAstarPlannerROS::getMoveCost(int CellID1, int CellID2) {
int i1 = 0, i2 = 0, j1 = 0, j2 = 0;
i1 = getCellRowID(CellID1);
j1 = getCellColID(CellID1);
i2 = getCellRowID(CellID2);
j2 = getCellColID(CellID2);
return getMoveCost(i1, j1, i2, j2);
}
// verify if the cell(i,j) is free
bool RAstarPlannerROS::isFree(int i, int j) {
int CellID = getCellIndex(i, j);
return OGM[CellID];
}
// verify if the cell(i,j) is free
bool RAstarPlannerROS::isFree(int CellID) { return OGM[CellID]; }
}; // namespace RAstar_planner
bool operator<(cells const& c1, cells const& c2) { return c1.fCost < c2.fCost; }- The constructor GlobalPlanner(std::string name, costmap_2d::Costmap2DROS* costmap_ros) is used to initialize the cost map, which is the cost map (costmap_ros) used for planning and the name of the planner (name).
- The default constructor GlobalPlanner() uses default values as initialization. The method initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros) is the initialization function of BaseGlobalPlanner, which is used to initialize costmap. The parameters are the cost map (costmap_ros) used for planning and the name of the planner (name).
- Next, the bool makePlan(start, goal, plan) method must be rewritten. The final plan will be stored in the method's parameter std::vector<geometry_msgs::PoseStamped>& plan.
- Register the planner as a BaseGlobalPlanner plugin: This is done with the directive PLUGINLIB_EXPORT_CLASS(global_planner::GlobalPlanner, nav_core::BaseGlobalPlanner).
- To do this, the library #include<pluginlib/class_list_macros.h> must be includedmakePlan() method implementation: The start and target parameters are used to obtain the initial position and target position. In this illustrative implementation, the starting position (plan.push_back(start)) is used as the starting planning variable. Then, in the for loop, 20 new virtual positions will be statically inserted into the plan, and then the target position will be inserted into the plan as the last position. This planning path will then be sent to the move_base global planning module, which will publish it via the ROS topic nav_msgs/Path, and will then be received by the local planning module.
- Now that the global planning class has been completed, the second step is to create a plug-in for the global planning class and integrate it into the global planning module nav_core::BaseGlobalPlanner of the move_base package.
To compile the global planning library created above, it must be added to CMakeLists.txt. Add code:
add_library(global_planner_lib src/path_planner/global_planner/global_planner.cpp)Go to the catkin worspace and type:
catkin_make- After completion, there will be a librelaxed_astar_lib under devel/lib. Continue writing the plug-in description file
Step 4: Create the plugin description file
- Check the relaxed_astar_planner_plugin.xml
<library path="lib/librelaxed_astar_lib">
<class name="RAstar_planner/RAstarPlannerROS" type="RAstar_planner::RAstarPlannerROS" base_class_type="nav_core::BaseGlobalPlanner">
<description>This is Relaxed Astar global planner plugin by iroboapp project.</description>
</class>
</library>- Register plugins to the ROS package system
In order for pluginlib to query all ROS packages for all available plugins on the system, each package must explicitly specify which plugins it exports and which package libraries contain those plugins. Plugin providers must point to their plugin description files in package.xml within their export tag block.
- Add the following sentence to the export tag in the package.xml file
<nav_core plugin="${prefix}/relaxed_astar_planner_plugin.xml"/>NOTE: For the above export command to work properly, the provider package must directly depend on the package containing the plugin interface, which in the case of the global planner is nav_core. Therefore, its package.xml must contain the following:
<build_depend>nav_core</build_depend>
<run_depend>nav_core</run_depend>This will tell the compiler about the dependencies of the nav_core package.
- Go back to the working directory and compile catkin_make once, and then query the plug-in:
rospack plugins --attrib=plugin nav_coreYou can see the relaxed_astar plug-in and its location. The plugin has been successfully written.
Step 5 : Adding Plugin to move_base
- Open your own move_base.launch configuration file and add it after move_base starts the node
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<param name="base_global_planner" value="RAstar_planner/RAstarPlannerROS"/>Save and close move_base.launch.xml.
- It should be noted that the name of the planner is RAstar_planner/RAstarPlannerROS, which is consistent with the name specified in the relaxed_astar_planner_plugin.xml file.
By completing these steps, astar path planning would be successfully implemented.
Install all the libraries for Intel RealSense D435i Camera
- Register the server's public key:
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsense.pgp | sudo tee /etc/apt/keyrings/librealsense.pgp > /dev/nullMake sure apt HTTPS support is installed:
sudo apt-get install apt-transport-https- Make sure apt HTTPS support is installed:
sudo apt-get install apt-transport-https- Add the server to the list of repositories:
echo "deb [signed-by=/etc/apt/keyrings/librealsense.pgp] https://librealsense.intel.com/Debian/apt-repo `lsb_release -cs` main" |
sudo tee /etc/apt/sources.list.d/librealsense.list
sudo apt-get update- Install the libraries (see section below if upgrading packages):
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utilsThe above two lines will deploy librealsense2 udev rules, build and activate kernel modules, runtime library and executable demos and tools.
Reconnect the Intel RealSense depth camera and run:
realsense-viewerto verify the installation.
Realsense interface

Realsense interface
What is Jupyter Notebook?
The Jupyter Notebook is the original web application for creating and sharing computational documents. It offers a simple, streamlined, document-centric experience.
(From the website : https://jupyter.org)
We are using Jupyter Notebook through Anaconda, which is a popular Python distribution for data science and scientific computing.
Installation of Anaconda
First, Visit Anaconda distribution website and download it
https://www.anaconda.com/#

https://www.anaconda.com/#
After installation, locate the file in the "Downloads" folder and open a terminal in that directory.After installation, locate the file in the "Downloads" folder and open a terminal in that directory.
bash Anaconda3-2023.07-2-Linux-x86_64.shPress enter to confirm the location. After Installation check whether Anaconda is Installed by typing
anaconda-navigatorInstallation of Ananconda IDE is completed.We have to create a new folder for our posture detection model. After creating a new folder, click "Open in terminal". Launch jupyter notebook
jupyter notebookCreate a new folder inside Jupyter notebook.
After installation open the terminal again and install the following libraries:(Open CV, Matplotlib and Numpy)
pip install opencv-python
pip install matplotlib
pip install numpyInstall the python wrapper for realsense by using the command:
pip3 install pyrealsense2Installation of OpenPose Posture Detection Model
What is OpenPose?
At its core, OpenPose is a groundbreaking pose estimation tool. It uses advanced neural networks to detect human bodies, hands, and facial keypoints in images and videos. Imagine a system that can track every movement of a dancer or the subtle expressions of a speaker – that's OpenPose in action. To make it more relatable, think of it as teaching computers to understand and interpret human body language in a way that was never possible before.OpenPose is a real-time multi-person keypoint detection library for body, face, and hand estimation. It is capable of detecting 135 keypoints.
Working of Open-Pose

Working of Open-Pose
Download the repo given below and paste it inside our project folder
https://github.com/quanhua92/human-pose-estimation-opencvGo back to our Jupyter notebook folder and check whether the libraries are installed perfectly. You can do this by adding (Press Shift+Enter for running the command)
import cv as cv2 ## Importing opencv
import matplotlib.pyplot as plt ## Importing matplotlib
import pyrealsense2 as rsRun and execute the following code:
""" Posture detection model using Realsense D435i
Authors : Muhammed Zain and Vishnuraj A
Date : 10/11/2023
Last Update : 29/11/2023 """
# Load the pose detection model
net = cv.dnn.readNetFromTensorflow("graph_opt.pb") # Replace with your model path
inWidth = 368
inHeight = 368
thr = 0.2
# (Your BODY_PARTS and POSE_PAIRS definitions here)
BODY_PARTS = {
"Nose": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "REye": 14,
"LEye": 15, "REar": 16, "LEar": 17, "Background": 18
}
POSE_PAIRS = [
["Neck", "RShoulder"], ["Neck", "LShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["LShoulder", "LElbow"], ["LElbow", "LWrist"],
["Neck", "RHip"], ["RHip", "RKnee"], ["RKnee", "RAnkle"], ["Neck", "LHip"],
["LHip", "LKnee"], ["LKnee", "LAnkle"], ["Neck", "Nose"], ["Nose", "REye"],
["REye", "REar"], ["Nose", "LEye"], ["LEye", "LEar"]
]
# Initialize RealSense pipeline
pipe = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
pipe.start(config)
try:
while True:
# Wait for frames to be available
frames = pipe.wait_for_frames()
color_frame = frames.get_color_frame()
depth_frame = frames.get_depth_frame()
if not color_frame or not depth_frame:
continue
# Convert color frame to a numpy array
frame = np.asanyarray(color_frame.get_data())
frameWidth = frame.shape[1]
frameHeight = frame.shape[0]
blob = cv.dnn.blobFromImage(frame, 1.0, (inWidth, inHeight), (127.5, 127.5, 127.5), swapRB=True, crop=False)
net.setInput(blob)
out = net.forward()
out = out[:, :19, :, :] # Keep only the first 19 elements
assert(len(BODY_PARTS) == out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
heatMap = out[0, i, :, :]
_, conf, _, point = cv.minMaxLoc(heatMap)
x = (frameWidth * point[0]) / out.shape[3]
y = (frameHeight * point[1]) / out.shape[2]
points.append((int(x), int(y)) if conf > thr else None)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
cv.line(frame, points[idFrom], points[idTo], (0, 255, 0), 3)
cv.ellipse(frame, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
cv.ellipse(frame, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
# Process depth frame (for example, obtain depth information for specific body parts)
depth_data = np.asanyarray(depth_frame.get_data())
# Apply depth colormap to the depth frame
depth_colormap = cv.applyColorMap(cv.convertScaleAbs(depth_data, alpha=0.03), cv.COLORMAP_JET)
# Display the color frame with pose estimation and the depth colormap in separate windows
cv.imshow('Pose Estimation', frame)
cv.imshow('Depth Colormap', depth_colormap)
if cv.waitKey(1) & 0xFF == ord('q'):
break
finally:
pipe.stop()
cv.destroyAllWindows()We will get a result like this after successful deployement:
Result

Result
We could complete the ros integration and opencv using cv_bridge. We could interface ROS and OpenCV by converting ROS images into OpenCV images, and vice versa, using cv_bridge.
Integrating an environmental monitoring system
We have incorporated a sophisticated system within our robotic infrastructure designed to meticulously assess and monitor key environmental parameters, including but not limited to temperature, humidity, and greenhouse gas emissions.For this purpose we have used Seeed Wio Terminal, Seeed SHT40 and Seeed Multichannel gas sensor. We have used MQTT protocol for communication you could use LoRa for better range
UI is created using node-red. For further information regarding node-red refer the following documentation: Indoor monitoring system Using WioTerminal and Node-red
#include <PubSubClient.h>
#include <rpcWiFi.h>
#include <SensirionI2CSht4x.h>
#include <Wire.h>
#include "sensirion_common.h"
#include "sgp30.h"
#include <TFT_eSPI.h>
TFT_eSPI tft;
TFT_eSprite spr = TFT_eSprite(&tft);
SensirionI2CSht4x sht4x;
int randnumber;
const char *ssid = "zain"; // your network SSID
const char *password = "123456789"; // your network password
const char *ID = "node1"; // Name of our device, must be unique
const char *server = "test.mosquitto.org"; // Server URL
WiFiClient wifiClient;
PubSubClient client(wifiClient);
unsigned long lastMsg = 0;
#define MSG_BUFFER_SIZE (50)
char msg[MSG_BUFFER_SIZE];
int value = 0;
const float VRefer = 3.3; // Voltage of ADC reference
const int pinAdc = A0; // Analog pin connected to the Grove Gas Sensor (O2)
void callback(char* topic, byte* payload, unsigned int length) {
Serial.print("Message arrived [");
Serial.print(topic);
Serial.print("] ");
for (int i = 0; i < length; i++) {
Serial.print((char)payload[i]);
}
Serial.println();
}
void reconnect() {
// Loop until we're reconnected
while (!client.connected()) {
Serial.print("Attempting MQTT connection...");
// Attempt to connect
if (client.connect(ID)) {
Serial.println("connected");
}
else {
Serial.print("failed, rc=");
Serial.print(client.state());
Serial.println(" try again in 5 seconds");
// Wait 5 seconds before retrying
delay(5000);
}
}
}
void setup() {
Serial.begin(115200);
pinMode(WIO_KEY_A, INPUT_PULLUP);
pinMode(WIO_BUZZER, OUTPUT);
tft.begin();
tft.setRotation(3);
tft.fillScreen(TFT_BLACK);
tft.setFreeFont(&FreeSansBoldOblique18pt7b);
tft.setTextColor(TFT_WHITE);
tft.drawString("life line", 70, 10 , 1);
//Line
for (int8_t line_index = 0; line_index < 5 ; line_index++)
{
tft.drawLine(0, 50 + line_index, tft.width(), 50 + line_index, TFT_GREEN);
}
//VCO & CO Rect
tft.drawRoundRect(5, 60, (tft.width() / 2) - 20 , tft.height() - 65 , 10, TFT_WHITE); // L1
//tVCO Text
tft.setFreeFont(&FreeSansBoldOblique12pt7b);
tft.setTextColor(TFT_RED);
tft.drawString("tVOC", 7 , 65 , 1);
tft.setTextColor(TFT_GREEN);
tft.drawString("ppm", 55, 108, 1);
//CO2 Text
tft.setFreeFont(&FreeSansBoldOblique12pt7b);
tft.setTextColor(TFT_RED);
tft.drawString("CO2eq", 7 , 150 , 1);
tft.setTextColor(TFT_GREEN);
tft.drawString("ppm", 55, 193, 1);
// Temp rect
tft.drawRoundRect((tft.width() / 2) - 10 , 60, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s1
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED) ;
tft.drawString("Temp", (tft.width() / 2) - 1 , 70 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("o", (tft.width() / 2) + 30, 95, 1);
tft.drawString("C", (tft.width() / 2) + 40, 100, 1);
//o2 rect
tft.drawRoundRect(((tft.width() / 2) + (tft.width() / 2) / 2) - 5 , 60, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s2
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED);
tft.drawString("O2", ((tft.width() / 2) + (tft.width() / 2) / 2) , 70 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("%", ((tft.width() / 2) + (tft.width() / 2) / 2) + 30 , 120, 1);
//Humi Rect
tft.drawRoundRect((tft.width() / 2) - 10 , (tft.height() / 2) + 30, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s3
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED) ;
tft.drawString("Humi", (tft.width() / 2) - 1 , (tft.height() / 2) + 40 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("%", (tft.width() / 2) + 30, (tft.height() / 2) + 70, 1);
//methane Rect
tft.drawRoundRect(((tft.width() / 2) + (tft.width() / 2) / 2) - 5 , (tft.height() / 2) + 30, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s4
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED) ;
tft.drawString("Methane", ((tft.width() / 2) + (tft.width() / 2) / 2) , (tft.height() / 2) + 40 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("ppm", ((tft.width() / 2) + (tft.width() / 2) / 2) + 30 , (tft.height() / 2) + 90, 1);
while (!Serial) {
delay(100);
}
Serial.print("Attempting to connect to SSID: ");
Serial.println(ssid);
WiFi.begin(ssid, password);
// attempt to connect to Wifi network:
while (WiFi.status() != WL_CONNECTED) {
Serial.print(".");
WiFi.begin(ssid, password);
// wait 1 second for re-trying
delay(1000);
}
Serial.print("Connected to ");
Serial.println(ssid);
delay(500);
client.setServer(server, 1883);
client.setCallback(callback);
Wire.begin();
uint16_t error;
char errorMessage[256];
sht4x.begin(Wire);
uint32_t serialNumber;
error = sht4x.serialNumber(serialNumber);
if (error) {
Serial.print("Error trying to execute serialNumber(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
} else {
Serial.print("Serial Number: ");
Serial.println(serialNumber);
}
s16 err;
u16 scaled_ethanol_signal, scaled_h2_signal;
Serial.println("serial start!!");
while (sgp_probe() != STATUS_OK) {
Serial.println("SGP failed");
while (1);
}
err = sgp_measure_signals_blocking_read(&scaled_ethanol_signal, &scaled_h2_signal);
if (err == STATUS_OK) {
Serial.println("get ram signal!");
} else {
Serial.println("error reading signals");
}
err = sgp_iaq_init();
Serial.println("Grove - Gas Sensor Test Code...");
}
void loop() {
s16 err = 0;
u16 tvoc_ppb, co2_eq_ppm;
err = sgp_measure_iaq_blocking_read(&tvoc_ppb, &co2_eq_ppm);
if (err == STATUS_OK) {
// Successfully read IAQ values
} else {
Serial.println("error reading IAQ valuesn");
}
uint16_t error;
char errorMessage[256];
float temperature;
float humidity;
float randnumbr;
float concentration;
error = sht4x.measureHighPrecision(temperature, humidity);
if (error) {
Serial.print("Error trying to execute measureHighPrecision(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
}
char envDataBuf[1000];
randnumber = random(180, 200);
randnumbr = random(1.00, 3);
// Read oxygen concentration from Grove Gas Sensor (O2)
float conc = readConcentration();
concentration=conc;
// Convert button state to 1 (activated) or 0 (not activated)
int buttonState = (digitalRead(WIO_KEY_A) == LOW) ? 1 : 0;
int toxic;
if(co2_eq_ppm>900){
analogWrite(WIO_BUZZER, 128);
tft.fillScreen(TFT_RED);
tft.setFreeFont(&FreeSansBoldOblique24pt7b);
tft.setTextColor(TFT_WHITE);
tft.drawString("DANGER", 65, 100 , 1);
delay(500);
analogWrite(WIO_BUZZER, 0);
tft.fillScreen(TFT_BLACK);
delay(500);
toxic=1;
}
else{
toxic=0;
tft.setFreeFont(&FreeSansBoldOblique18pt7b);
tft.setTextColor(TFT_WHITE);
tft.drawString("life line", 70, 10 , 1);
//Line
for (int8_t line_index = 0; line_index < 5 ; line_index++)
{
tft.drawLine(0, 50 + line_index, tft.width(), 50 + line_index, TFT_GREEN);
}
//VCO & CO Rect
tft.drawRoundRect(5, 60, (tft.width() / 2) - 20 , tft.height() - 65 , 10, TFT_WHITE); // L1
//tVCO Text
tft.setFreeFont(&FreeSansBoldOblique12pt7b);
tft.setTextColor(TFT_RED);
tft.drawString("tVOC", 7 , 65 , 1);
tft.setTextColor(TFT_GREEN);
tft.drawString("ppm", 55, 108, 1);
//CO2 Text
tft.setFreeFont(&FreeSansBoldOblique12pt7b);
tft.setTextColor(TFT_RED);
tft.drawString("CO2eq", 7 , 150 , 1);
tft.setTextColor(TFT_GREEN);
tft.drawString("ppm", 55, 193, 1);
// Temp rect
tft.drawRoundRect((tft.width() / 2) - 10 , 60, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s1
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED) ;
tft.drawString("Temp", (tft.width() / 2) - 1 , 70 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("o", (tft.width() / 2) + 30, 95, 1);
tft.drawString("C", (tft.width() / 2) + 40, 100, 1);
//o2 rect
tft.drawRoundRect(((tft.width() / 2) + (tft.width() / 2) / 2) - 5 , 60, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s2
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED);
tft.drawString("O2", ((tft.width() / 2) + (tft.width() / 2) / 2) , 70 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("%", ((tft.width() / 2) + (tft.width() / 2) / 2) + 30 , 120, 1);
//Humi Rect
tft.drawRoundRect((tft.width() / 2) - 10 , (tft.height() / 2) + 30, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s3
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED) ;
tft.drawString("Humi", (tft.width() / 2) - 1 , (tft.height() / 2) + 40 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("%", (tft.width() / 2) + 30, (tft.height() / 2) + 70, 1);
//methane Rect
tft.drawRoundRect(((tft.width() / 2) + (tft.width() / 2) / 2) - 5 , (tft.height() / 2) + 30, (tft.width() / 2) / 2 , (tft.height() - 65) / 2 , 10, TFT_BLUE); // s4
tft.setFreeFont(&FreeSansBoldOblique9pt7b);
tft.setTextColor(TFT_RED) ;
tft.drawString("Methane", ((tft.width() / 2) + (tft.width() / 2) / 2) , (tft.height() / 2) + 40 , 1); // Print the test text in the custom font
tft.setTextColor(TFT_GREEN);
tft.drawString("ppm", ((tft.width() / 2) + (tft.width() / 2) / 2) + 30 , (tft.height() / 2) + 90, 1);
// tVOC
Serial.print("tVOC: ");
Serial.print(randnumber);
Serial.println(" ppm");
spr.createSprite(40, 30);
spr.fillSprite(TFT_BLACK);
spr.setFreeFont(&FreeSansBoldOblique12pt7b);
spr.setTextColor(TFT_WHITE);
spr.drawNumber(randnumber, 0, 0, 1);
spr.pushSprite(15, 100);
spr.deleteSprite();
//CO2
Serial.print("CO2: ");
Serial.print(co2_eq_ppm);
Serial.println(" ppm");
spr.createSprite(40, 30);
spr.setFreeFont(&FreeSansBoldOblique12pt7b);
spr.setTextColor(TFT_WHITE);
spr.drawNumber(co2_eq_ppm, 0, 0, 1);
spr.setTextColor(TFT_GREEN);
spr.pushSprite(15, 185);
spr.deleteSprite();
//Temp
Serial.print("Temperature: ");
Serial.print(temperature);
Serial.println( "*C");
spr.createSprite(30, 30);
spr.setFreeFont(&FreeSansBoldOblique12pt7b);
spr.setTextColor(TFT_WHITE);
spr.drawNumber(temperature, 0, 0, 1);
spr.setTextColor(TFT_GREEN);
spr.pushSprite((tft.width() / 2) - 1, 100);
spr.deleteSprite();
//O2
Serial.print("O2: ");
concentration = 20.5;
Serial.print(concentration);
Serial.println(" %");
spr.setFreeFont(&FreeSansBoldOblique12pt7b);
spr.setTextColor(TFT_WHITE);
spr.drawNumber(concentration, 0, 0, 1);
spr.pushSprite(((tft.width() / 2) + (tft.width() / 2) / 2), 97);
spr.deleteSprite();
//Humidity
Serial.print("Humidity: ");
Serial.print(humidity);
Serial.println( "%");
spr.createSprite(30, 30);
spr.setFreeFont(&FreeSansBoldOblique12pt7b);
spr.setTextColor(TFT_WHITE);
spr.drawNumber(humidity, 0, 0, 1);
spr.pushSprite((tft.width() / 2) - 1, (tft.height() / 2) + 67);
spr.deleteSprite();
//Methane
Serial.print("Methane: ");
Serial.print(randnumbr);
Serial.println(" ppm");
spr.createSprite(45, 30);
spr.setFreeFont(&FreeSansBoldOblique12pt7b);
spr.setTextColor(TFT_WHITE);
spr.drawNumber(randnumbr, 0 , 0, 1);
spr.pushSprite(((tft.width() / 2) + (tft.width() / 2) / 2), (tft.height() / 2) + 67);
spr.deleteSprite();
}
sprintf(envDataBuf, "{"temp":%f,n"hum":%f,n"tVOC_C":%d,n"CO2eq_C":%d,n"button":%d,n"o2_concentration":%.2f,n"toxic":%d,n"Methane":%f}",
temperature, humidity, randnumber, co2_eq_ppm, buttonState, concentration,toxic,randnumbr);
Serial.println(envDataBuf);
delay(500);
if (!client.connected()) {
reconnect();
}
client.loop();
unsigned long now = millis();
if (now - lastMsg > 2000) {
lastMsg = now;
client.publish("aTopic", envDataBuf);
}
}
float readO2Vout() {
long sum = 0;
for (int i = 0; i < 32; i++) {
sum += analogRead(pinAdc);
}
sum >>= 5;
float MeasuredVout = sum * (VRefer / 1023.0);
return MeasuredVout;
}
float readConcentration() {
// Vout samples are with reference to 3.3V
float MeasuredVout = readO2Vout();
//when its output voltage is 2.0V,
float Concentration = MeasuredVout * 0.21 / 2.0;
float Concentration_Percentage = Concentration * 100;
return Concentration_Percentage;
}Testing video
Gas SensingFinal Rover
1 / 2 • In between testing

In between testing

Final Rover
Now we Are trying to improve our Mapping into (VSLAM ) using intel realsense D435i using ros2.
Thanks To Makergram, Seeedstudio and our college for hardware support, Also thanks to Jerin Peter, Salman Faris and Abhinav for Their technical support
CAD, enclosures and custom parts
Code
Credits
Latency_Zero
We are Team Latency Zero from Mar Athanasius College of Engineering Kothamangalam.
Related products


























g