




Psoc 4 : How To Control A Servo

Made by electrouser805 / Sensors
About the project
This is a tutorial about controlling a Servo with PSoC by generating PWM, adjusting Frequency and Duty Cycle!
Project info
Difficulty: Moderate
Platforms: Cypress
Estimated time: 1 hour
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components
Story
Controlling a Servo with Arduino is damn easy ! There are libraries to do things, you don't need to know what's going on with the control signal that commands the servo. There is an Arduino tutorial for those who might need
But how to do that with PSoC 4 ?
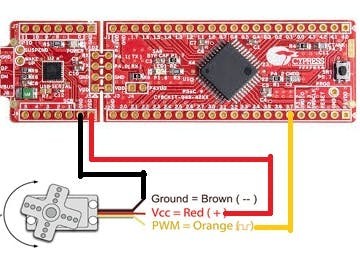
According to SG90 Micro Servo (Tower Pro) datasheet, you have to make PWM signal like this to control the Servo -
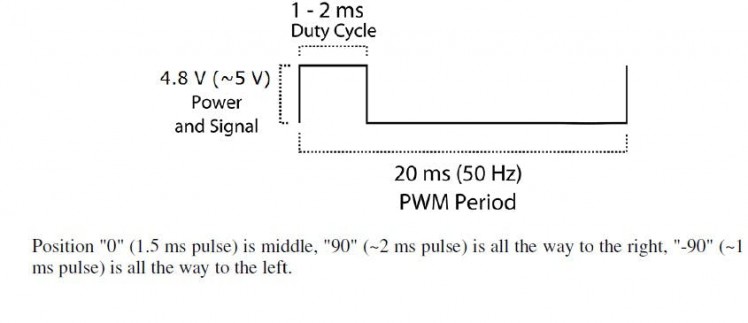 Servo control pulse
Servo control pulse
Configuring the PWM module
The answer is TCPWM component, but wait ! How do I make a 50 Hz signal (20 mS) and vary the Duty cycle between 5% (1mS) to 10 % (2mS) ?
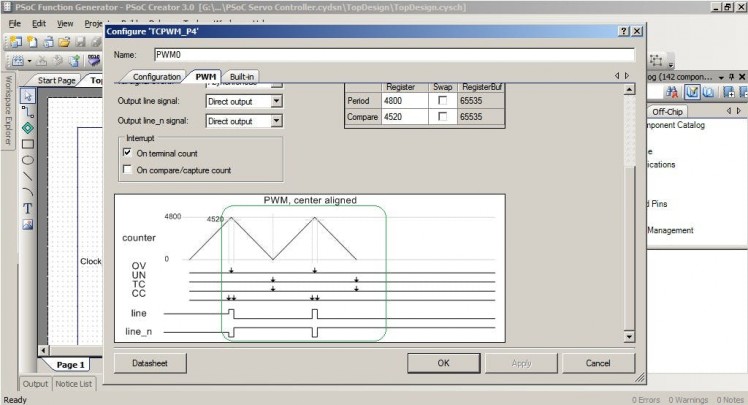
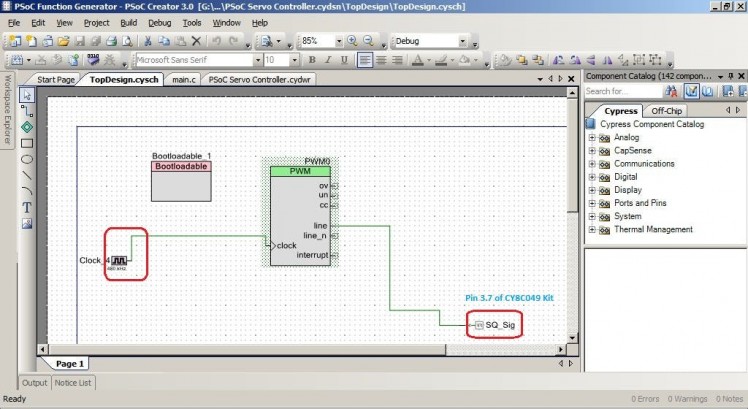 Setting up PWM Component
Setting up PWM Component
- By Changing the Value of Period from "1 to 65535", we can vary PWM Frequency.
- By Changing the Value of Compare from "1 to Period Value", we can vary Duty Cycle.
- By Changing the Value of fclk ( Clock signal to PWM component ), we can vary the Frequency range.
- The larger the fclk, the higher is the max frequency .
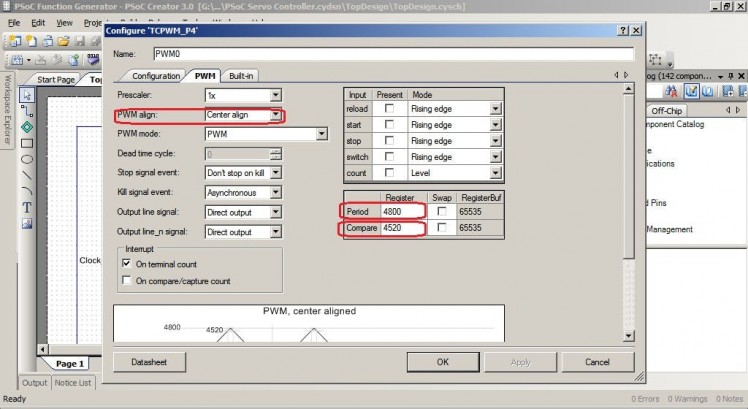 Configuring Frequency and Duty
Configuring Frequency and Duty
Formula
Formulas for this Configuration of PWM (Center Aligned i.e. symmetric PWM) -
Period = Fclk / (2 X Desired Frequency )
Compare = Period - ( Desired Duty X Period )
Calculating Frequency and Duty Cycle
Here, Fclk for the PWM Component is chosen 480 kHz,
We need a PWM signal of 50 Hz ( Our Desired Freq )
So, Period = 480000 / ( 2 X 50 ) = 4800
and Compare (min) = 4800 - ( 10% X 4800 ) = 4320
Compare (max) = 4800 - ( 5% X 4800 ) = 4560
Varying the Compare value between 4320 to 4560, we can control the servo because it will generate the desired signal required to do the job !
PWM0_WriteCompare(value) API ( or Function) is used to change the Duty Cycle from C code, which controls the position of the servo !
 Visualizing Output Waveform
Visualizing Output Waveform
Important : PWM Pin must be Checked as Hardware Connection !
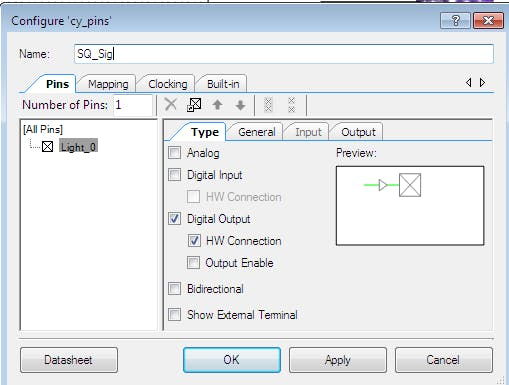 Pin Driven by Internal H/W
Pin Driven by Internal H/W
Otherwise , there will be no output !
Servo in Action
Sorry for the crappy quality video. Don't have a better camera right now!
Servo Motion

