


Nxp Cup 2023
About the project
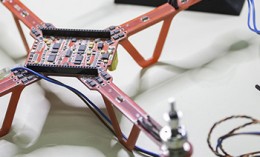
Project about constructing and making automotive car for NXP CUP 2023, qualification round in Brno. It uses NXP board fmuk66v3 for control, Pixycam v2.1 for sensing racetrack and ultrasonic sensor for sensing obstacles.
Items used in this project
Hardware components


Story
We're members of the robotics club called JedoBoti. We have been programming robots for a long time, mainly on LEGO MINDSTORMS and Arduino platforms. When we came across the NXP CUP, we didn't hesitate to take on this new challenge. After a lot of research, the car drove like this:
We are currently preparing for the qualification round, which will take place on 19.4. at the Technical University in Brno
Schematics, diagrams and documents
CAD, enclosures and custom parts
Code
Related products


























g
Leave your feedback...