











Line Following Robot

Made by alya-batrisya / Robotics
About the project
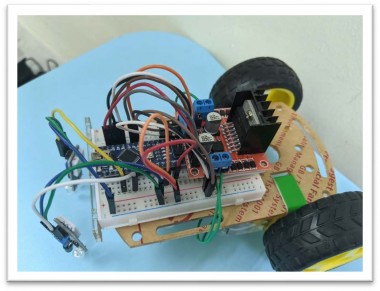
Our 2WD smart line following robot is a mobile machine that can detect and follow lines drawn on the ground. Usually, the path is predefined and can be displayed as a black line on a white surface with a high-contrast color, or it can be invisible as a magnetic field.
Project info
Difficulty: Moderate
Platforms: Arduino
Estimated time: 7 days
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components
View all
Story
Our 2WD smart line following robot is a mobile machine that can detect and follow lines drawn on the ground. Usually, the path is predefined and can be displayed as a black line on a white surface with a high-contrast color, or it can be invisible as a magnetic field. Of course, this type of robot should use an infrared (IR) sensor installed under the robot to detect the line. After that, the data is transferred to the processor through a specific conversion bus. So, the processor will decide the appropriate compliments and then send them to the controller, so the line following robot will follow the route. In this project, we walk through the 2WD Smart Robot Car design, implementation, and testing process.
Schematics, diagrams and documents
Code
Credits
Related products


























g