

Lego Waterbot

Made by ashokr
About the project
Lego's 1st voice controlled robot for home garden irrigation.
Project info
Difficulty: Moderate
Platforms: Amazon Alexa, Amazon Web Services, LEGO MindStorms, Microsoft, Raspberry Pi
Estimated time: 7 days
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components






Software apps and online services

Story
This project demonstrate the idea that, make a robot for irrigation and voice controlled via amazon echo dot.
I brought the Lego Mindstorms EV3 Kit, 10 days took for me to reach my home. Started working on Missions , Assembled the robot then completed the missions one by one.

Tthen i have implemented my concepts by adding new skills set in Amazon
1 / 2
a) GOTO commends -> PLANT or POT, STATION example "GOTO PLANT TWO"
b) ACTIVATE WATERBOT, RELEASE WATER, CHECK WATER LEVEL and etc.
used the IR sensors for detecting the PLANT or POT, The Waterbot will check the IR distance before releasing the water.
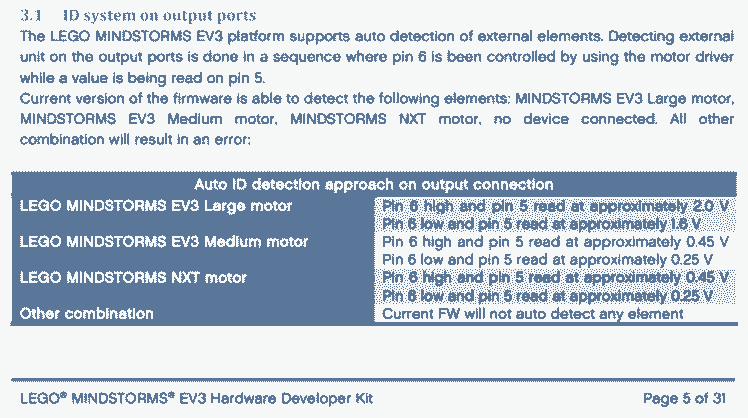
For my requirement I need to control the external pump so did some basic research on Lego wiring connections and got some ideas from that. I just curious about it so I broken a touch sensor to see what is inside :) Also this Hardware Kit document helps me in understanding about Auto ID detection
Execution:
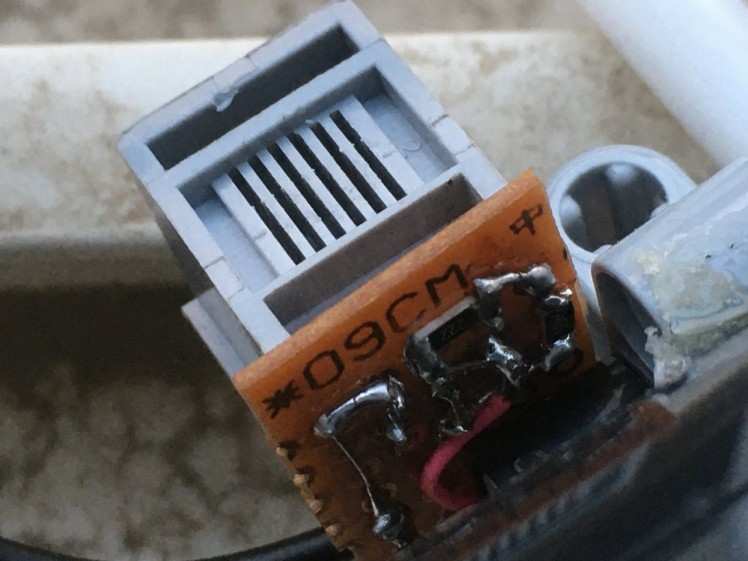
I created the simple resistor voltage divider circuits to detect the dc motor pump on lego control unit.
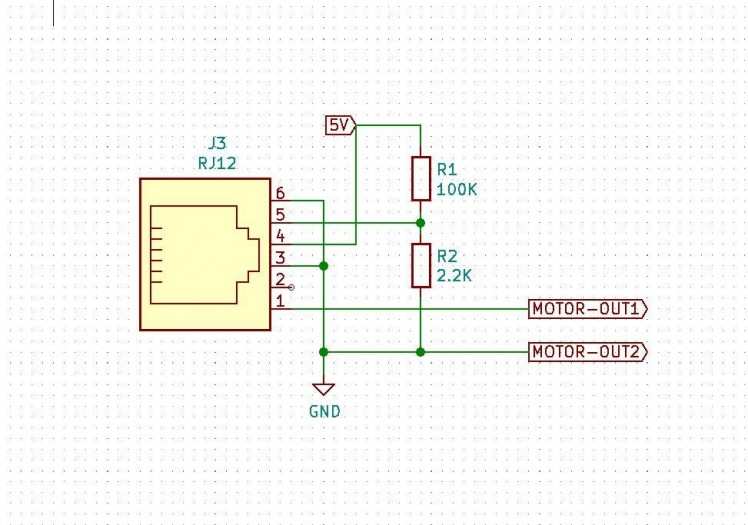
I tested this circuit with detection and controlling the dc pump motor. In the python code the following changes required to detect this dc pump as motor.
import OUTPUT_A, SpeedPercent, Motor,waterpump = Motor(OUTPUT_A) waterpump.on_for_seconds(SpeedPercent(50),1) // To Turn ON the Motorwaterpump.on_for_seconds(SpeedPercent(-100),1) // To Turn OFF the MotorAs next step I have created small PCB with this circuit and sticked into theone of small Lego blocks. Setup the motor inside the water bottle along with 1/4 inch tube and did wiring with the help of fevistick and glue gum so that the water wont leak outside. Now the small adapter RJ12 board can go into the top of the tank (water bottle). Due to time limitation I couldn't install the water level sensing in tank.
1 / 2

Plants/Pots Mapping:
After setting up the Waterbot, its important to map the location of plants/pots to the Waterbot, I used the basic relation between speed & time to predict the distance
speed = distance/timeAssume speed =1 (for 25% as per the experiments)
distance = time,
Yes if we run the Lego bot for 1sec with 25% speed it wil cross 10cm
in my case I set the speed to 50%, so mapped all the pots/plants distance accordingly in my python scripts.
For rotating left and right, I have to maintain the speed at 45% to get complete 90 degree rotation for seconds. This also relatively same,
distance traveled ( 2sec x 45% speed) = degree of rotation. (90 Degree)
water released in percentage, 10% is equal to running the pump for 1sec, 50% is for 5sec.
Finally I setup everything and fill the water in bottle, The Waterbot is ready to serve the water.
This Waterbot enables the new product version for LEGO kit with water pump and tank system.
Working:
Opening the "Waterbot" by issuing the command "Alexa Open WaterBots"
Alexa: Welcome Ashok, voice interface activated
(background music playing)
Ashok: Alexa, GOTO PLANT ONE,
Alexa: Command "PLANT ONE"activated
(Water-bot started moving )
Ashok: Alexa, ACTIVATE "Water-bot Mode",
Alexa: "Water-bot" mode Activated
Ashok: Alexa, RELEASE water 50%,
Does Alexa, release the water??
Checkout the full working video here
Schematics, diagrams and documents
Code
Credits
Leave your feedback...