


Gesture Control Robot

Made by nilutpolkashyap / Robotics / Sensors / Vehicles / IoT
About the project
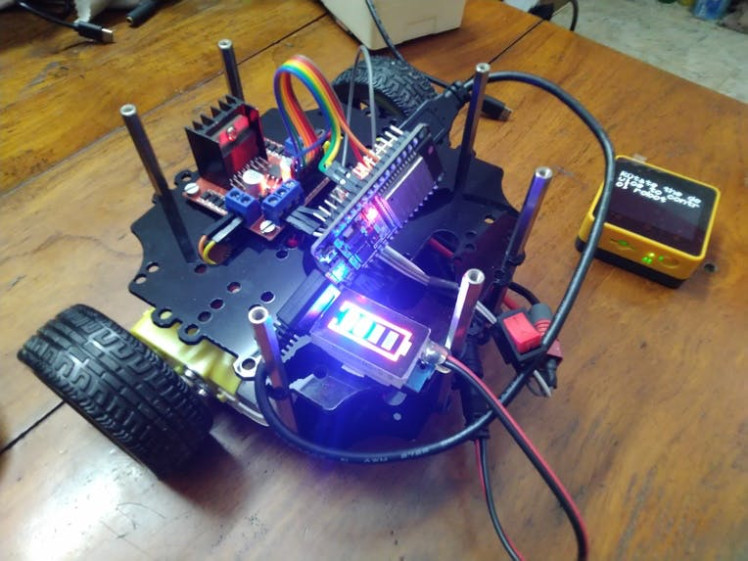
It is a gesture-controlled robot which is controlled by sending commands from an M5Stack ESP32 board.
Project info
Difficulty: Moderate
Estimated time: 1 week
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components

Story
I always wanted to work on a gesture-controlled robot that can be controlled by my changing the orientation of my hands.
I used an M5Stack ESP32 board which contains an in-build IMU sensor for detecting the gestures. The gestures are detected using the accelerometer. The acceleration in the X and Y axis data are send to the onboard EPS32 of the robot using the ESP-NOW protocol.
Components UsedM5Stack AWS IOT Edukit Core2

The Core2 for AWS comes with an ESP32-D0WDQ6-V3 microcontroller. The main unit is equipped with a 2.0-inch capacitive touch screen that provides a smooth and responsive human-machine interface. It also comes with an MPU6886 which provides a 6-axis internal IMU.
I have used the IMU and the Screen for this project. The accelerometer of the IMU is used to get the tilt direction of the M5stack device.
ESP32
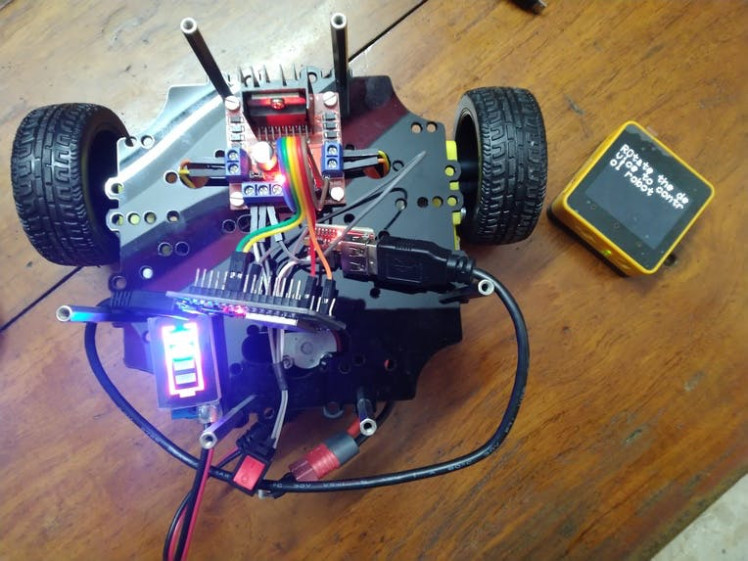
ESP 32 Pins < -- > L298n Motor Driver
GPIO 14 < -- > Motor 1 PWM
GPIO 27 Motor 1 IN1
GPIO 26 < -- > Motor 1 IN2
GPIO 25 < -- > Motor 2 IN3
GPIO 33 < -- > Motor 2 IN4
GPIO 32 < -- > Motor 2 PWM
ESP-NOW ProtocolI have used the ESP-NOW protocol for sending the Data from the Edukit to the ESP32 for controlling the robot.

I have used the One-way Communication of ESP-NOW Protocol for sending the data. This configuration is very easy to implement and it is great to send data from one board to the other like sensor readings or ON and OFF commands to control GPIOs.
Project VideoSchematics, diagrams and documents
Code
Credits
nilutpolkashyap
A multidisciplinary engineering graduate with expertise in designing and building intelligent robotics systems. Profound knowledge in ROS, SLAM, Path Planning, Motion Planning and Computer Vision. Have a systematic approach towards research with experience in technical documentation aiming to carry out high impact research work.
Related products







Leave your feedback...