







Ficar - Self Driving Robotic Car For Nxp Cup Competition

Made by emlab-fimuni / 3D Printing / Robotics / Vehicles
About the project
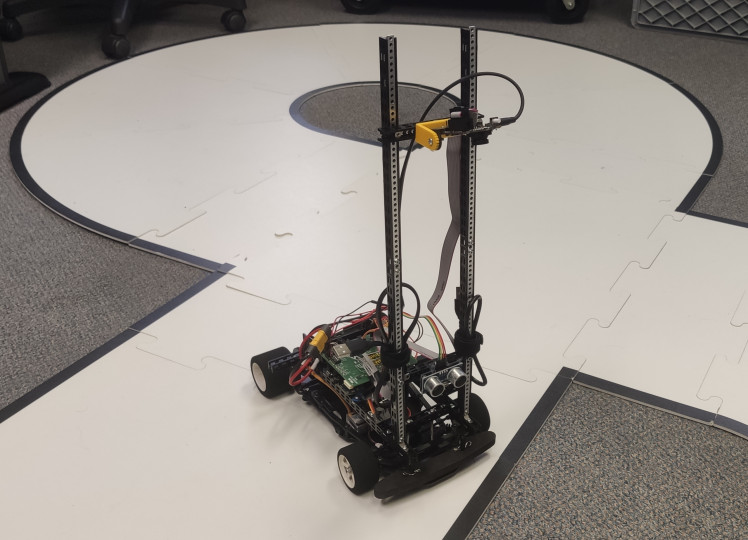
Race car built with NXP component - K66 board, Pixy2 Camera and XRAY X12'22 chassis.
Project info
Difficulty: Moderate
Platforms: NXP
Estimated time: 2 months
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project
Hardware components
View all
Story
This car will be used in NXP Cup competition hosted by NXP.
Chassis:
based on previous experiences with custom chassis from some of our team members, we have decided to switch to a brand new racing chassis
Camera:
We are using pixy2 camera with built in vector recognition. This is quite helpful for us.
The camera is mounted on a high pole for improved visibility.
Custom shield board was really helpful with integrating all car components data and power...
Timeline:
Assembling the chassis.
Building prototyping platform on top of the frame with totem building pieces.
Work in progress on steering algorithm.
Prototyping wild platforms and camera mounting positions.

Implementing the ultrasonic distance sensor for detecting an object on the racetrack.
Schematics, diagrams and documents
Credits
Related products


























g