



4 Steps To Develop An Edge-ai Road Segmentation Cam

Made by Johanna / Artificial intelligence / Automotive / Environmental Sensing / Photos & Video / Vehicles
About the project
Good for Ride-share / Auto-pilot / Self-driving Applications.
Project info
Difficulty: Easy
Platforms: Intel, Raspberry Pi, ON Semiconductor
Estimated time: 1 hour
License: Apache License 2.0 (Apache-2.0)
Items used in this project
Hardware components
Software apps and online services
Story
Nowadays what is the hottest, promising, and exciting technology segmentation? Metaverse? No. I would say it is self-driving, accounting for the concepts, products, and stock prices at Nasdaq:). Right now there have been many excellent electronic vehicle companies, for example, Tesla, Rivian, Li Auto, etc, and all of them provide ADAS(Advanced Driving Assistance System)
When we talk about ADAS technology, one common area is perception, which means to sense, see, view, feel the surroundings using computer vision, deep learning, machine learning, image sensors, Lidars, etc. Sounds complicated? Yes. But to have a step-in concept of this, we can do a simple and common road segmentation demo and see how to develop this kind of application.



Details
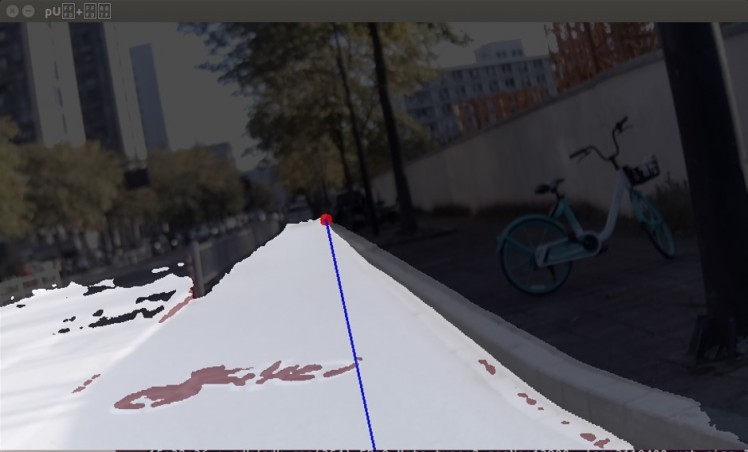
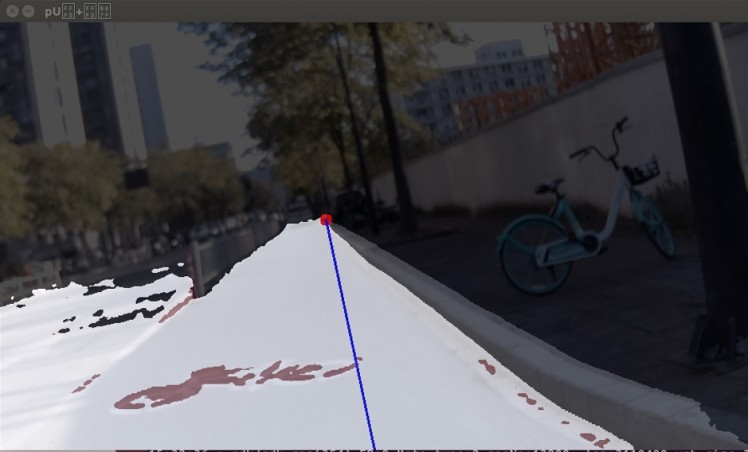
Below we will show how to develop a road segmentation demo using OpenNCC and its open-source SDK. The deployed road segmentation was originally downloaded from Intel OpenVINO's pre-trained model. For better performance, you can replace the model with your own-trained one, but the developing steps are the same.
In addition to the analytical implementation of the segmentation model, it also judges the road direction through corner recognition and points distance analysis.
Configure the PC
The following commands are operated on the PC. Currently, we support Ubuntu versions greater than 16.04.
- Install libusb and ffmpeg
$ sudo apt-get update
$ sudo apt-get install libgl1-mesa-dev -y
$ sudo apt-get install unixodbc -y
$ sudo apt-get install libpq-dev -y
$ sudo apt-get install ffmpeg -y
$ sudo apt-get install libusb-dev -y
$ sudo apt-get install libusb-1.0.0-dev -y
- Clone openncc repo
$ git clone https://gitee.com/eyecloud/openncc.git
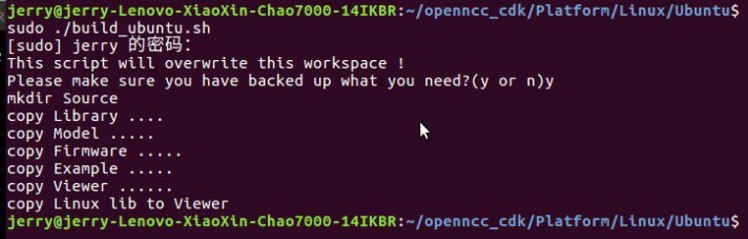
- Build environment(ubuntu)
$ cd openncc/Platform/Linux/Ubuntu
$ ./build_ubuntu.sh
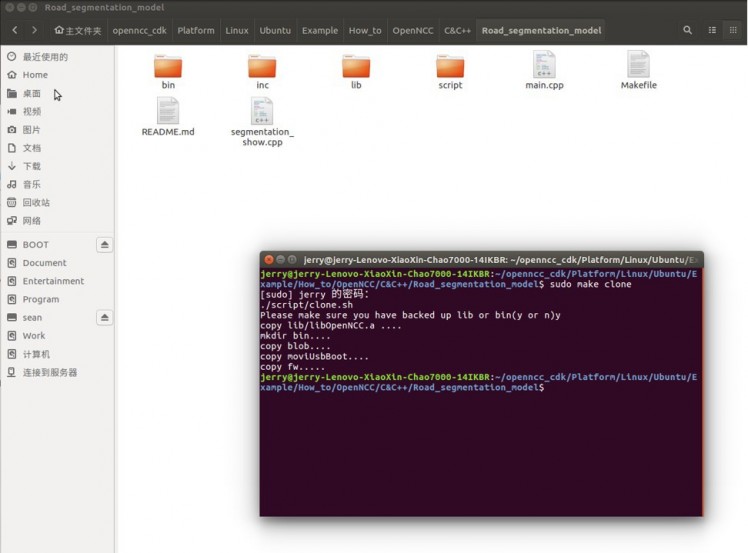
$ cd Example/How_to/OpenNCC/C&C++/Road_segmentation_model
$ sudo make clone
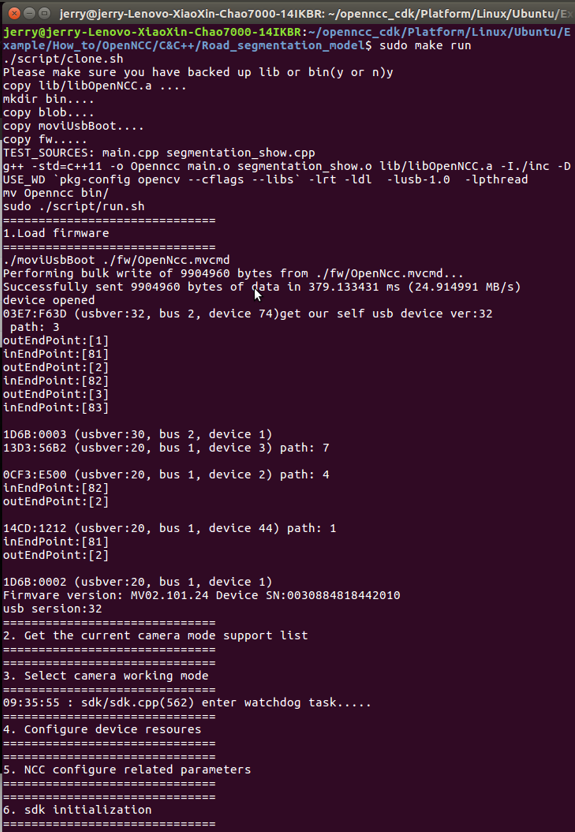
- Compiler and run
$ sudo make all
$ sudo make run
Running effect
Credits
Related products


























g