



2. Robotics Sensors With The Ra8m1 Feather Som

About the project
This project walks you through integrating common sensor types on the RA8M1 Feather SoM.
Project info
Difficulty: Easy
Platforms: Renesas
Estimated time: 1 hour
License: GNU General Public License, version 3 or later (GPL3+)
Items used in this project

Story
Hardware requirements:
Software requirements:
Introduction
In the rapidly evolving field of robotics, sensors play a crucial role in bridging the gap between machines and their environment. Just as humans rely on their senses to interact with the world, robots depend on sensors to perceive, interpret, and respond to their surroundings. This tutorial will explore the importance of sensors in robotics, presenting practical implementations using the RA8M1 Feather SoM. We'll dive into the world of robotic sensing by examining various sensor types and their applications.
Through these examples, you'll gain practical insights into how sensors transform robots from mere programmed devices into adaptive, responsive, and increasingly intelligent systems capable of tackling real-world challenges. By the end of this tutorial, you'll understand why sensors are considered the "eyes and ears" of robots and how they contribute to the ongoing revolution in fields such as manufacturing, healthcare, exploration, and everyday life. More importantly, you'll have hands-on experience implementing various sensor types on the RA8M1 Feather SoM, preparing you for your robotic projects and innovations.
Analog Sensors
Analog sensors convert physical quantities such as temperature, light intensity, or pressure into a continuous electrical signal. This signal varies smoothly over a range, providing high-resolution measurements. Common types of analog sensors include temperature sensors such as thermistors, light sensors such as photoresistors, pressure sensors, flex sensors, and potentiometers (for position or rotation).
Analog sensors offer several advantages, including high resolution and sensitivity, along with the simple circuitry needed for using them. However, they are susceptible to electrical noise and their signals may degrade over long distances.
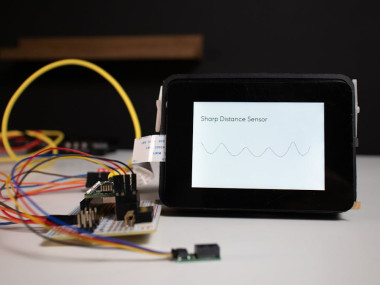
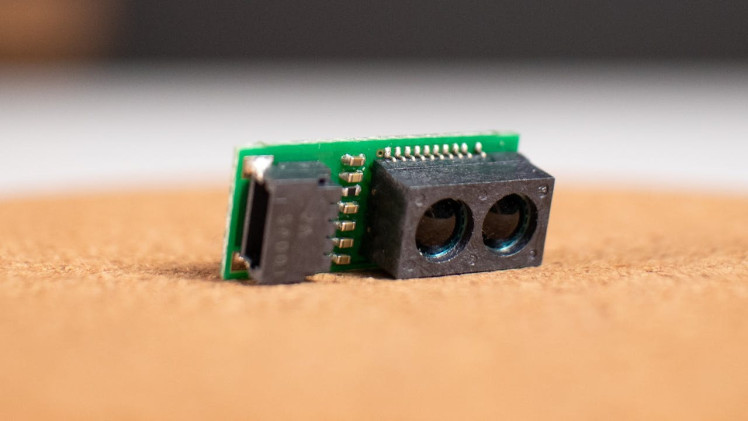
For this example, we'll focus on the Sharp GP2Y0E02A distance sensor. This compact and versatile sensor is an excellent choice for robotics applications, particularly for obstacle detection and distance measurement. The GP2Y0E02A emits an infrared beam and measures the angle of the reflected light to determine the distance to an object. This method allows for accurate measurements even with objects of varying colors or materials.
The Renesas RA8 Feather board features 6 12-bit Analog-to-Digital Converter input pins (from A0 to A5), allowing precise reading of analog sensor outputs. Let's explore a basic example of how to read analog values from the Sharp GP2Y0E02A sensor.
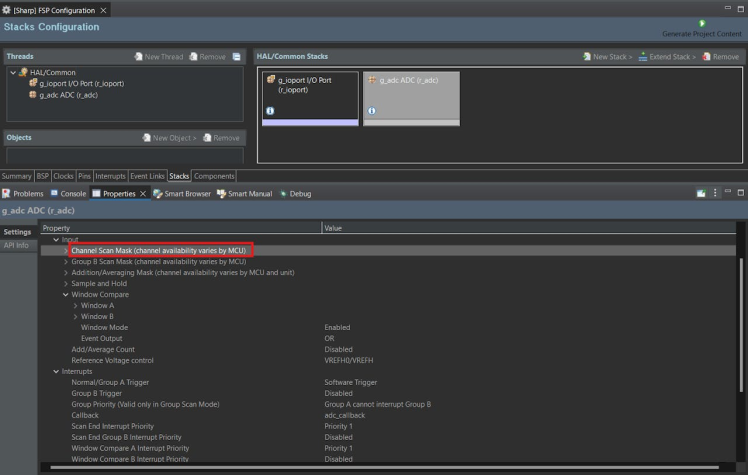
After importing the project into e2 studio, you can customize how the sensor works by changing the mode from Continuous Scan to Single Scan, and selecting the channel you want to scan. To select a specific channel, you need to check its corresponding box from the "Channel Scan Mask" menu and modify the "adc.h" header file to scan the desired channel.
Steps:
1. Open the "Channel Scan Mask" menu and check the desired channel.
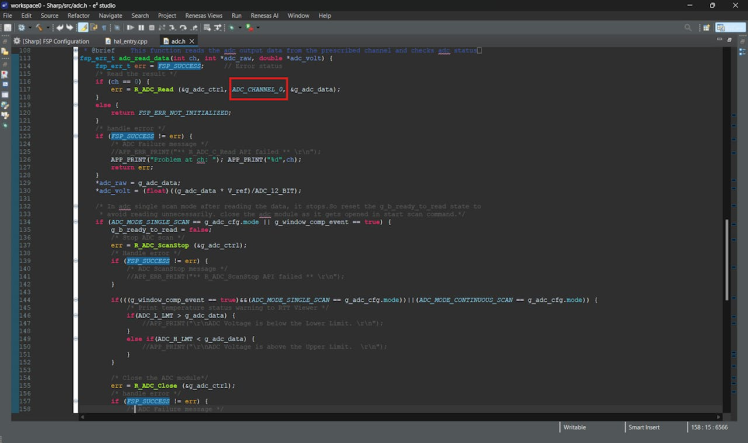
2. Edit the "adc.h" header file to include the desired channel.
This process allows you to tailor the sensor's scanning behavior according to your requirements.
Note that the RA8M1 Feather SoM also features an analog reference voltage pin (labeled as AREF) used to set the reference voltage against which all analog inputs are measured. This can be particularly useful for improving accuracy when the input voltage range of the analog sensors does not match the default reference voltage (3v3) of the microcontroller.
Digital Sensors
Digital sensors are crucial components in robotics, providing binary output based on a threshold or specific condition. Unlike analog sensors, digital sensors output discrete values, typically High or Low. They are ideal for detecting presence, contact, or specific states in a robotic system. Common types of digital sensors include limit switches, proximity sensors, optical encoders, Hall effect sensors, and infrared break-beam sensors.
Let's explore digital sensors and their implementation with the Renesas RA8 Feather board, using a limit switch as our primary example. A limit switch is a simple yet effective digital sensor widely used in robotics for detecting physical contact or position limits. It's essentially a mechanical switch that changes state when actuated by physical contact.
Limit switches are a simple and reliable solution for the detection of physical limits, but they may require debouncing in software for cleaner signals and are also prone to mechanical wear over time.

The RA8M1 Feather SoM board features 7 digital GPIOs (D5, D6, D9, D10, D11, D12, D13, D14).
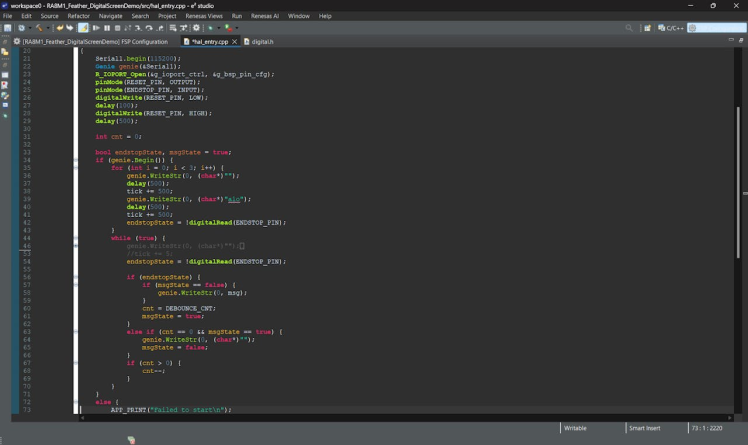
Let's explore a basic example of how to read the state of a limit switch connected to one of the digital pins of the RA8M1 Feather SoM. In the code below, when the switch is pressed, the OBJECT DETECTED message is displayed on the screen.
I2C Sensors
I2C sensors communicate using a two-wire protocol (SDA for data and SCL for clock), allowing multiple devices to share the same bus. This makes them ideal for complex robotic systems requiring numerous sensors. I2C sensors provide several benefits, including the ability to support multiple sensors on a single bus, utilizing a standardized communication protocol, offering a wide range of available sensors, and typically having lower power consumption. However, there are considerations to keep in mind: bus speed limitations compared to SPI, potential address conflicts when using multiple devices, and maximum bus length limitations.
In this section, we'll explore I2C sensors and their implementation with the Renesas RA8 Feather board, using the Zalmotek PMOD Optical Sensor Evaluation Board 1 AMS OSRAM as our example. This evaluation board showcases three advanced I2C sensors from ams OSRAM, each offering unique capabilities for robotic perception:
1. TMF8828 - Direct Time-of-Flight (ToF) Sensor
- Measures absolute distance using light pulses
- Range: Up to 2.5 meters
- Applications: Obstacle detection, gesture recognition
2. AS7331 - Low-Power, Low-Noise Integrated UV Sensor
- Measures UVA, UVB, and UVC light
- Applications: Environmental monitoring, UV exposure detection
3. AS7343 - 14-Channel Multi-Purpose Spectral Sensor
- Measures light across multiple wavelengths
- Applications: Color sensing, light quality assessment

By integrating these I2C sensors you can enhance your robot's sensing capabilities:
- Use the TMF8828 for precise distance measurements and obstacle avoidance.
- Employ the AS7331 for UV detection in outdoor robotics or environmental monitoring.
- Utilize the AS7343 for advanced color sensing or light quality assessment in various applications.
SPI Sensors
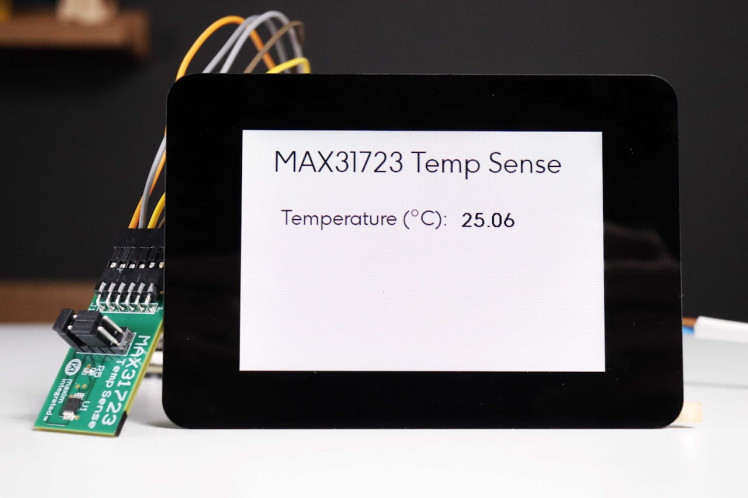
SPI (Serial Peripheral Interface) sensors are crucial components in many robotic systems, offering high-speed data transfer and precise control. In this section, we'll explore SPI sensors and their implementation with the RA8M1 Feather SoM, using the MAX31723PMB1 temperature sensor as our primary example.
SPI sensors use a synchronous serial communication protocol that operates in full duplex mode. SPI typically uses four wires: MOSI (Master Out Slave In), MISO (Master In Slave Out), SCK (Serial Clock), and SS (Slave Select).
The MAX31723PMB1# is a high-precision digital temperature sensor that communicates via SPI. Let's look at its key features:
- Temperature range: -55C to +125C
- Accuracy: ±0.5C (max) from -10C to +85C
- Resolution: 12-bit (0.0625C)
- Fast conversion time: 21ms (typical)
- SPI compatible interface (up to 5MHz)
- Low power consumption: 600 uA (typical)
This sensor is ideal for applications requiring precise temperature measurements, such as environmental monitoring, thermal management in robotics, or industrial process control.
What's next?
Sensors are the cornerstone of modern robotics, serving as the vital link between machines and their environment. Throughout this tutorial, we've explored various types of sensors - analog, digital, I2C, and SPI - and their implementations using the versatile RA8M1 Feather SoM.
By integrating sensors with the RA8M1 Feather SoM, you can create robots that are more aware, responsive, and capable of tackling complex real-world challenges. Whether you're building a simple obstacle-avoiding robot or a sophisticated environmental monitoring system, the principles and examples covered in this tutorial provide a solid foundation for your future projects.
To continue your journey with the RA8M1 Feather SoM, check out these related tutorials:
- Controlling Outputs with the RA8M1 Feather SoM
- Connectivity and Remote Control in Robotics with the RA8M1 Feather SoM
- Edge ML with the RA8M1 Feather SoM
- RA8M1 Feather SoM-Powered Robotic Dog
Leave your feedback...